PWM (pulse-width modulation) offers precise control over motor speed and torque by varying the duty cycle of digital pulses, resulting in higher efficiency and reduced heat generation compared to analog control. Analog control adjusts motor inputs through continuous voltage variation, which can cause power dissipation and less accurate performance in dynamic environments. Robotics systems benefit from PWM due to its superior energy efficiency, better response times, and compatibility with microcontroller-based control units.
Table of Comparison
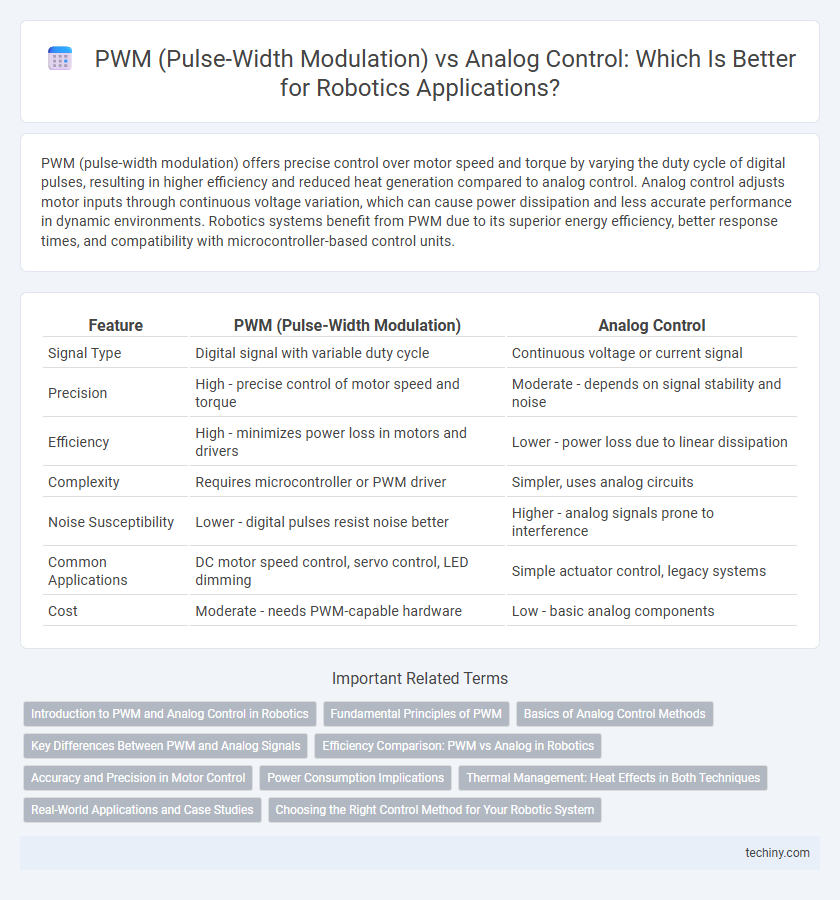
| Feature | PWM (Pulse-Width Modulation) | Analog Control |
|---|---|---|
| Signal Type | Digital signal with variable duty cycle | Continuous voltage or current signal |
| Precision | High - precise control of motor speed and torque | Moderate - depends on signal stability and noise |
| Efficiency | High - minimizes power loss in motors and drivers | Lower - power loss due to linear dissipation |
| Complexity | Requires microcontroller or PWM driver | Simpler, uses analog circuits |
| Noise Susceptibility | Lower - digital pulses resist noise better | Higher - analog signals prone to interference |
| Common Applications | DC motor speed control, servo control, LED dimming | Simple actuator control, legacy systems |
| Cost | Moderate - needs PWM-capable hardware | Low - basic analog components |
Introduction to PWM and Analog Control in Robotics
Pulse-width modulation (PWM) in robotics involves controlling motor speed or actuator position by varying the duty cycle of digital signals, enabling precise and energy-efficient performance. Analog control uses continuous voltage signals to adjust motor power, but often lacks the fine-tuned accuracy and responsiveness that PWM offers. PWM's ability to manage power delivery with rapid switching improves control over torque and speed, making it a preferred method in modern robotic systems.
Fundamental Principles of PWM
PWM (pulse-width modulation) controls robotic motors by varying the duty cycle of a digital signal to regulate power delivery, enabling precise speed and torque adjustments without energy loss typical in analog control methods. Unlike analog control that continuously varies voltage, PWM switches the power on and off rapidly, maintaining efficiency and reducing heat generation. This method achieves fine motor control by modulating pulse width while keeping frequency constant, optimizing performance in battery-powered robotic systems.
Basics of Analog Control Methods
Analog control methods in robotics involve continuous voltage or current signals to regulate actuator movement and sensor input, providing smooth and precise control. Unlike PWM (pulse-width modulation), which uses digital pulses to simulate analog signals by varying duty cycles, analog control offers direct proportional control without switching noise. This approach is fundamental in low-speed, high-precision robotic applications requiring minimal electrical interference and consistent signal quality.
Key Differences Between PWM and Analog Signals
PWM (pulse-width modulation) controls motor speed by varying the duty cycle of a digital signal, offering precise energy efficiency and reduced heat dissipation in robotic actuators. Analog control uses continuous voltage variations to regulate speed, often causing more power loss and less accuracy in response time. PWM signals provide better noise immunity and simpler interface compatibility with microcontrollers compared to the fluctuating nature of analog signals.
Efficiency Comparison: PWM vs Analog in Robotics
PWM offers higher efficiency in robotics by minimizing energy loss through rapid switching, which reduces heat generation in motors and controllers compared to analog control. Analog control dissipates power continuously as heat due to constant voltage regulation, leading to lower overall efficiency in robotic actuators. Consequently, PWM enables more precise power delivery and longer battery life in robotic systems, making it the preferred method for motor speed and torque control.
Accuracy and Precision in Motor Control
Pulse-width modulation (PWM) provides higher precision and accuracy in motor control by delivering consistent power levels through rapid switching, reducing heat dissipation and improving motor response times compared to analog control. Analog control relies on variable voltage levels that can introduce noise and signal degradation, leading to less stable motor speed and torque outputs. PWM's digital nature enables fine-tuned adjustments in duty cycle, resulting in enhanced repeatability and precise motor positioning in robotics applications.
Power Consumption Implications
PWM (pulse-width modulation) significantly reduces power consumption in robotics by efficiently controlling motor speed through rapid switching, minimizing heat dissipation compared to analog control, which continuously adjusts voltage and results in higher energy loss. PWM delivers power in pulses, allowing motors to operate at full voltage during ON cycles and zero voltage during OFF cycles, thus conserving energy and extending battery life. Analog control circuits often suffer from resistive losses in variable voltage settings, leading to greater overheating and increased electrical consumption in robotic applications.
Thermal Management: Heat Effects in Both Techniques
PWM control in robotics generates heat due to rapid switching of current, causing thermal stress on components like motors and MOSFETs, necessitating effective heat sinks and cooling systems. Analog control produces continuous current flow, resulting in steady but often higher heat dissipation in resistive elements, impacting thermal management differently. Understanding heat effects in PWM and analog systems is critical for optimizing motor efficiency, prolonging component lifespan, and ensuring reliable robotic operation.
Real-World Applications and Case Studies
Pulse-width modulation (PWM) offers precise motor speed and torque control in robotics applications such as robotic arms and autonomous vehicles, outperforming analog control by minimizing heat dissipation and improving energy efficiency. Case studies in industrial robots demonstrate PWM's capability to enhance responsiveness and durability under varying load conditions, directly impacting productivity and maintenance costs. Real-world implementations highlight PWM's superior compatibility with digital control systems, enabling advanced features like variable speed drives and adaptive feedback loops.
Choosing the Right Control Method for Your Robotic System
Pulse-width modulation (PWM) offers precise motor speed control and high efficiency by varying duty cycles, making it ideal for robotics applications requiring fine-tuned torque and energy optimization. Analog control provides smoother signal variations but often suffers from slower response times and increased heat dissipation, limiting its effectiveness in dynamic robotic systems. Selecting PWM ensures better performance and power management in complex robotic actuators compared to traditional analog methods.
PWM (pulse-width modulation) vs analog control Infographic