Teach pendants offer intuitive, hands-on control for programming robots directly on the factory floor, making them ideal for quick adjustments and simple tasks. Offline programming enables complex, precise robot path creation within specialized software, reducing downtime by allowing programs to be tested and optimized virtually before deployment. Combining both methods enhances efficiency, with offline programming handling detailed planning and teach pendants supporting real-time fine-tuning.
Table of Comparison
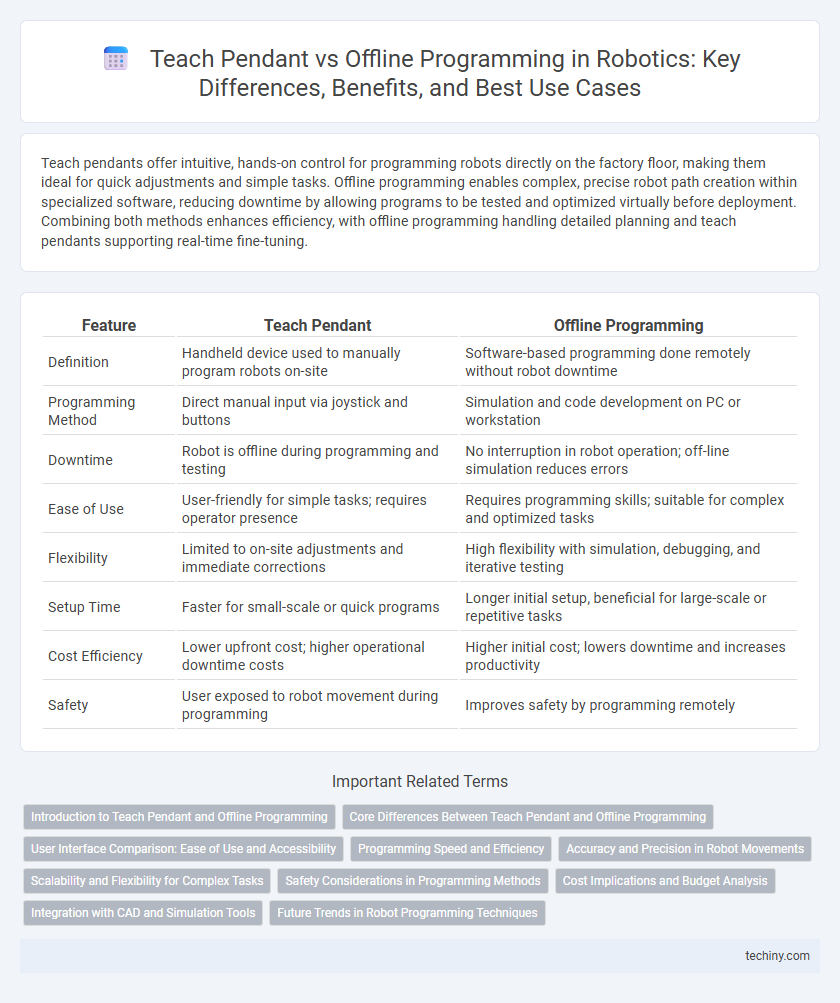
| Feature | Teach Pendant | Offline Programming |
|---|---|---|
| Definition | Handheld device used to manually program robots on-site | Software-based programming done remotely without robot downtime |
| Programming Method | Direct manual input via joystick and buttons | Simulation and code development on PC or workstation |
| Downtime | Robot is offline during programming and testing | No interruption in robot operation; off-line simulation reduces errors |
| Ease of Use | User-friendly for simple tasks; requires operator presence | Requires programming skills; suitable for complex and optimized tasks |
| Flexibility | Limited to on-site adjustments and immediate corrections | High flexibility with simulation, debugging, and iterative testing |
| Setup Time | Faster for small-scale or quick programs | Longer initial setup, beneficial for large-scale or repetitive tasks |
| Cost Efficiency | Lower upfront cost; higher operational downtime costs | Higher initial cost; lowers downtime and increases productivity |
| Safety | User exposed to robot movement during programming | Improves safety by programming remotely |
Introduction to Teach Pendant and Offline Programming
Teach pendants provide real-time, intuitive control for programming industrial robots directly on the factory floor, enabling operators to guide and adjust robot movements via a handheld interface. Offline programming utilizes specialized software to create and simulate robotic tasks in a virtual environment, improving productivity by minimizing downtime and allowing complex path planning without halting production. Both methods enhance robot programming efficiency, with teach pendants favoring manual precision and offline programming prioritizing advanced automation and integration.
Core Differences Between Teach Pendant and Offline Programming
Teach pendant programming involves direct, real-time control of a robot via a handheld device, enabling precise manual guidance and immediate adjustments during the programming process. Offline programming utilizes specialized software to create robot instructions on a computer without halting production, allowing simulation and optimization before deployment. Core differences include the level of on-site interaction, with teach pendants requiring physical presence and immediate feedback, while offline programming enhances efficiency through virtual environment testing and reduced downtime.
User Interface Comparison: Ease of Use and Accessibility
Teach pendants offer a tactile, direct interface with intuitive touchscreens and physical buttons, enabling operators to program robots in real-time, which enhances ease of use for on-the-floor adjustments. Offline programming platforms provide sophisticated graphical user interfaces with drag-and-drop features, simulation capabilities, and remote accessibility, making them suitable for complex task planning without interrupting production. Both interfaces cater to different user expertise levels, with teach pendants favoring immediate, hands-on control and offline programming emphasizing detailed task design and optimization.
Programming Speed and Efficiency
Teach pendant programming offers direct, real-time control, allowing operators to quickly adjust and fine-tune robot movements, which enhances programming speed in on-site setups. Offline programming enables the creation and simulation of complex robotic tasks in a virtual environment, significantly improving efficiency by minimizing production downtime and allowing parallel task development. Choosing between teach pendant and offline programming depends on the need for immediate adjustments versus long-term efficiency and scalability in robotic system deployment.
Accuracy and Precision in Robot Movements
Teach pendants offer real-time control that enhances robot movement accuracy through human-in-the-loop adjustments, while offline programming relies on pre-planned paths that improve precision by minimizing manual intervention and ensuring repeatable trajectories. Offline programming benefits from simulation environments that detect and correct path errors before deployment, increasing positional accuracy and reducing variability. Both methods impact robot motion quality, with teach pendants optimizing adaptability and offline programming maximizing consistency and repeatability in complex tasks.
Scalability and Flexibility for Complex Tasks
Teach pendant programming offers limited scalability and flexibility, as it requires manual input for each movement and is time-consuming for complex tasks. Offline programming enables scalable automation by allowing programmers to simulate and optimize robot paths virtually, significantly reducing downtime and facilitating complex task execution. This approach enhances flexibility by supporting rapid modifications and integration with advanced simulation software for diverse robotic applications.
Safety Considerations in Programming Methods
Teach pendant programming requires operators to be physically close to the robot, increasing the risk of accidents and necessitating strict safety protocols such as emergency stop buttons and protective barriers. Offline programming minimizes direct human-robot interaction during the programming phase, significantly reducing exposure to hazardous environments and enabling safer validation of complex tasks in virtual simulations. Implementing offline programming enhances overall safety by allowing error detection before deployment, decreasing downtime caused by accidents.
Cost Implications and Budget Analysis
Teach pendants require significant upfront investment in hardware and extensive labor hours for manual programming and operator training, increasing initial costs. Offline programming reduces downtime by enabling virtual simulation and pre-programming, leading to lower operational expenses and faster deployment, thus optimizing overall budget utilization. Evaluating cost implications involves analyzing total cost of ownership, including maintenance, training, and productivity gains between these two approaches.
Integration with CAD and Simulation Tools
Teach pendants offer direct robot control but have limited integration with CAD and simulation tools, restricting real-time process optimization. Offline programming excels in leveraging CAD models and simulation environments to create precise, collision-free robot paths before deployment. Integration with advanced simulation software enhances offline programming by enabling virtual commissioning and reducing production downtime.
Future Trends in Robot Programming Techniques
Future trends in robot programming techniques emphasize enhanced integration of AI-driven offline programming with intuitive teach pendant interfaces, enabling faster deployment and increased accuracy. Cloud-based simulation platforms and machine learning algorithms facilitate continuous improvement in robot task optimization without halting production lines. Advances in natural language processing and augmented reality interfaces are expected to further simplify robot programming, reducing dependence on expert operators.
Teach pendant vs Offline programming Infographic