Monocular vision in robotics uses a single camera to perceive depth through motion and shading cues, offering a lightweight and cost-effective solution but limited spatial accuracy. Stereo vision employs two cameras to capture images from slightly different angles, enabling precise depth estimation and improved 3D scene reconstruction. While stereo vision enhances obstacle detection and navigation in complex environments, it requires higher computational power and calibration compared to monocular systems.
Table of Comparison
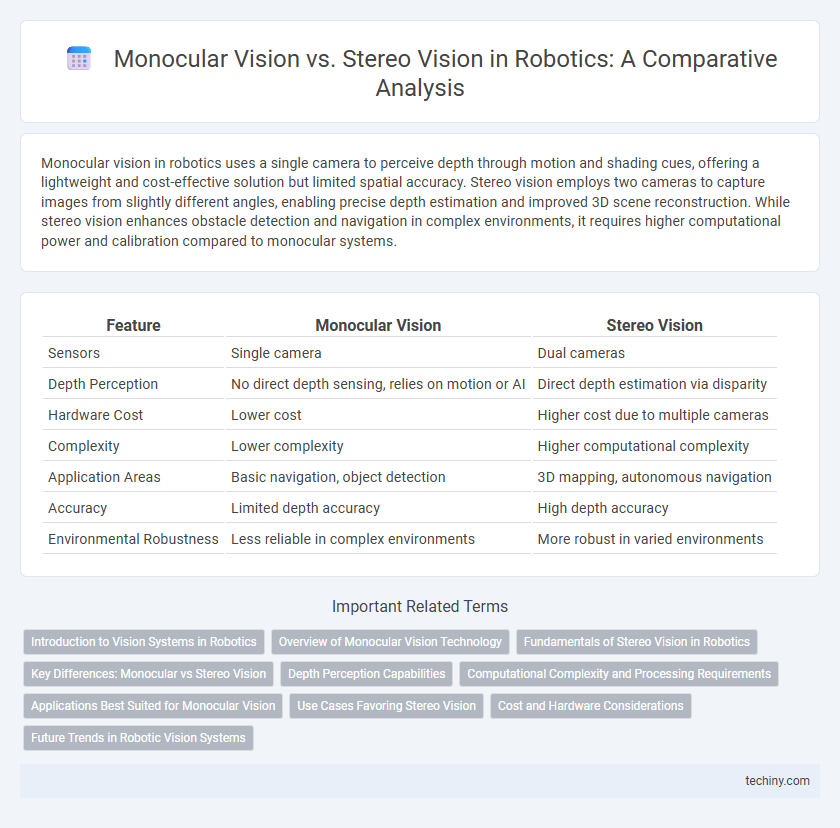
| Feature | Monocular Vision | Stereo Vision |
|---|---|---|
| Sensors | Single camera | Dual cameras |
| Depth Perception | No direct depth sensing, relies on motion or AI | Direct depth estimation via disparity |
| Hardware Cost | Lower cost | Higher cost due to multiple cameras |
| Complexity | Lower complexity | Higher computational complexity |
| Application Areas | Basic navigation, object detection | 3D mapping, autonomous navigation |
| Accuracy | Limited depth accuracy | High depth accuracy |
| Environmental Robustness | Less reliable in complex environments | More robust in varied environments |
Introduction to Vision Systems in Robotics
Monocular vision systems in robotics utilize a single camera to capture visual information, offering advantages in cost and simplicity while relying on motion or additional sensors to infer depth. Stereo vision systems employ two cameras spaced apart to mimic human binocular vision, enabling direct depth perception by comparing image disparities, which enhances obstacle detection and spatial understanding. The choice between monocular and stereo vision impacts a robot's ability to navigate complex environments, affecting accuracy, computational load, and hardware requirements.
Overview of Monocular Vision Technology
Monocular vision technology in robotics utilizes a single camera to capture 2D images, enabling robots to interpret visual information through depth cues such as motion parallax, shading, and perspective. This approach simplifies hardware requirements and reduces computational complexity compared to stereo vision systems, which rely on two cameras to generate depth maps via triangulation. Advances in machine learning and computer vision algorithms enhance monocular systems' ability to estimate depth and spatial awareness, making them effective for tasks like object detection, navigation, and scene understanding.
Fundamentals of Stereo Vision in Robotics
Stereo vision in robotics relies on simultaneously capturing images from two horizontally displaced cameras to extract depth information by analyzing disparities between corresponding pixels. Fundamental to this process is triangulation, where differences in viewpoints enable precise calculation of object distances to facilitate accurate 3D perception and environment mapping. Monocular vision, in contrast, infers depth from single-camera cues like motion parallax or shading but lacks the direct geometric depth measurement intrinsic to stereo vision systems.
Key Differences: Monocular vs Stereo Vision
Monocular vision uses a single camera to capture 2D images, primarily relying on motion, shading, and texture for depth perception, whereas stereo vision employs two cameras spaced apart to generate real-time 3D depth maps through disparity matching. Stereo vision offers more accurate spatial understanding and depth estimation critical for robotic navigation and manipulation, while monocular systems are simpler, cost-effective, and computationally less intensive but less precise in 3D reconstruction. Key differences include depth accuracy, computational complexity, hardware requirements, and environmental robustness, influencing robot design choices based on application-specific needs.
Depth Perception Capabilities
Monocular vision in robotics estimates depth by analyzing visual cues such as size, texture, and motion from a single camera, offering lower cost and simpler hardware but less accurate depth perception. Stereo vision uses two cameras spaced at a known distance, enabling precise triangulation to calculate depth with higher accuracy and better spatial understanding. Depth perception capabilities in stereo vision are superior for obstacle detection and 3D reconstruction in autonomous systems compared to monocular vision.
Computational Complexity and Processing Requirements
Monocular vision systems require significantly lower computational complexity and processing power compared to stereo vision, as they process only a single image stream. Stereo vision involves intensive calculations for disparity mapping and depth estimation from two synchronized image inputs, increasing both CPU and memory usage. Efficient algorithm design and hardware acceleration are critical for real-time stereo vision applications in robotics.
Applications Best Suited for Monocular Vision
Monocular vision systems are best suited for applications requiring compact, cost-effective solutions such as object recognition, navigation in constrained environments, and basic depth estimation through motion analysis. These systems excel in lightweight robotics platforms and drones where minimal hardware complexity and low power consumption are critical. Monocular cameras enable effective scene understanding in scenarios where stereo vision's depth accuracy is less crucial.
Use Cases Favoring Stereo Vision
Stereo vision excels in autonomous navigation and obstacle detection by providing accurate depth perception through dual-camera setups, crucial for drones and self-driving cars. It enhances 3D mapping in robotic manipulation tasks where precise spatial understanding is required for object grasping and assembly. Stereo vision outperforms monocular systems in dynamic environments by enabling real-time distance measurement and scene reconstruction for advanced robotics applications.
Cost and Hardware Considerations
Monocular vision systems require a single camera, significantly reducing hardware costs and simplifying integration in robotic applications compared to stereo vision setups that use two cameras. Stereo vision demands precise calibration and greater computational power to process depth information, increasing both initial expenses and maintenance complexity. Choosing monocular vision often benefits cost-sensitive projects, while stereo vision offers enhanced depth perception at the expense of higher hardware investments.
Future Trends in Robotic Vision Systems
Monocular vision systems in robotics leverage a single camera to interpret depth and spatial information through motion cues and AI algorithms, offering cost-effective and lightweight solutions. Stereo vision employs paired cameras to generate accurate depth maps via disparity calculations, enhancing obstacle detection and navigation precision in dynamic environments. Future trends emphasize hybrid approaches integrating monocular AI-driven inference with stereo depth sensing, optimizing computational efficiency and robustness for advanced autonomous robots.
Monocular vision vs Stereo vision Infographic