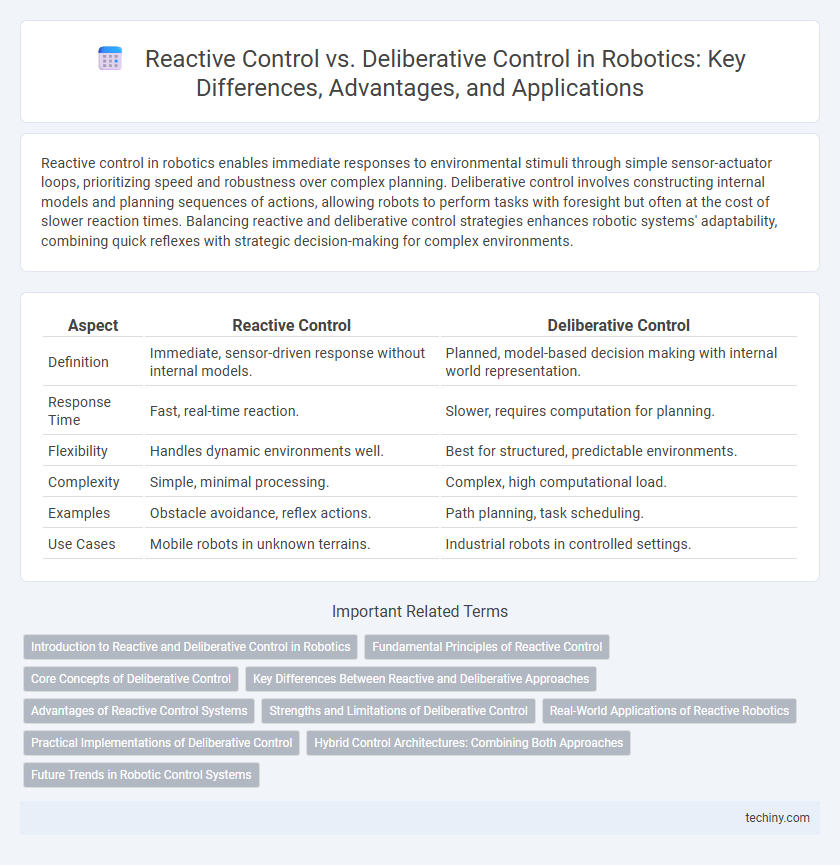
Reactive control in robotics enables immediate responses to environmental stimuli through simple sensor-actuator loops, prioritizing speed and robustness over complex planning. Deliberative control involves constructing internal models and planning sequences of actions, allowing robots to perform tasks with foresight but often at the cost of slower reaction times. Balancing reactive and deliberative control strategies enhances robotic systems' adaptability, combining quick reflexes with strategic decision-making for complex environments.
Table of Comparison
| Aspect | Reactive Control | Deliberative Control |
|---|---|---|
| Definition | Immediate, sensor-driven response without internal models. | Planned, model-based decision making with internal world representation. |
| Response Time | Fast, real-time reaction. | Slower, requires computation for planning. |
| Flexibility | Handles dynamic environments well. | Best for structured, predictable environments. |
| Complexity | Simple, minimal processing. | Complex, high computational load. |
| Examples | Obstacle avoidance, reflex actions. | Path planning, task scheduling. |
| Use Cases | Mobile robots in unknown terrains. | Industrial robots in controlled settings. |
Introduction to Reactive and Deliberative Control in Robotics
Reactive control in robotics emphasizes immediate sensor-based responses, enabling robots to adapt quickly to dynamic environments without relying on internal world models. Deliberative control involves planning and decision-making processes that use stored knowledge and environmental representations to achieve complex tasks with foresight. Combining reactive and deliberative control strategies enhances robotic autonomy by balancing real-time responsiveness with goal-oriented planning.
Fundamental Principles of Reactive Control
Reactive control in robotics operates on the principle of immediate response to sensory inputs without reliance on internal models or planning, enabling swift adaptation to dynamic environments. It emphasizes decentralized, behavior-based mechanisms that prioritize real-time interaction between the robot and its surroundings. This control paradigm reduces computational complexity and enhances robustness by continuously mapping sensor data directly to motor actions.
Core Concepts of Deliberative Control
Deliberative control in robotics relies on detailed world models and symbolic reasoning to plan actions through hierarchical task decomposition. It emphasizes prediction, long-term goal achievement, and explicit representation of knowledge, enabling robots to make informed decisions before execution. This contrasts with reactive control's stimulus-response mechanisms by prioritizing deliberate planning over immediate environmental reactions.
Key Differences Between Reactive and Deliberative Approaches
Reactive control in robotics prioritizes immediate sensor feedback for real-time responses, enabling fast, low-latency actions without extensive computation or planning. Deliberative control relies on comprehensive environment models and pre-planned strategies, optimizing complex task completion through higher processing power and prediction. The key difference lies in responsiveness versus planning depth, with reactive systems excelling in dynamic, unpredictable settings and deliberative systems suited for structured, goal-oriented scenarios.
Advantages of Reactive Control Systems
Reactive control systems in robotics offer significant advantages such as real-time responsiveness and robustness to dynamic environments by processing sensory information directly to generate immediate actions. These systems excel in low-latency scenarios, enabling robots to handle unexpected obstacles and changes without complex computations, which enhances reliability in uncertain or rapidly changing settings. The simplicity of reactive architectures reduces computational overhead and improves fault tolerance, making them ideal for tasks requiring quick reflexes and constant adaptation.
Strengths and Limitations of Deliberative Control
Deliberative control excels in complex task planning by utilizing comprehensive environmental models and long-term decision-making processes, enabling robots to execute sophisticated sequences of actions. Its main limitation lies in high computational demands and slower response times, which reduce effectiveness in dynamic or unpredictable environments. This approach provides accuracy and foresight but struggles with real-time adaptability compared to reactive control systems.
Real-World Applications of Reactive Robotics
Reactive control in robotics enables real-time responses by processing sensory inputs directly to motor actions, making it ideal for dynamic and unpredictable environments such as disaster response and autonomous vehicles. Unlike deliberative control, which relies on pre-planned sequences and extensive computation, reactive robots excel in tasks requiring immediate adaptation without complex decision-making. This approach enhances robustness and fault tolerance in real-world applications like robotic vacuum cleaners, warehouse automation, and search-and-rescue missions.
Practical Implementations of Deliberative Control
Deliberative control in robotics involves planning actions based on a comprehensive model of the environment, enabling robots to perform complex tasks like navigation and manipulation with foresight. Practical implementations leverage algorithms such as A* and heuristic search to generate optimal paths and decision trees, integrating sensor data to adapt plans in dynamic settings. This approach is essential in applications requiring precise task execution, including autonomous vehicles and industrial automation, where long-term planning outweighs reactive responses.
Hybrid Control Architectures: Combining Both Approaches
Hybrid control architectures in robotics integrate reactive control's fast, reflexive responses with deliberative control's goal-oriented planning to optimize robotic performance. These systems enable real-time environmental interaction while maintaining strategic decision-making, enhancing adaptability in dynamic environments. The combination leverages sensor data fusion and layered control frameworks to balance immediate obstacle avoidance with long-term task execution.
Future Trends in Robotic Control Systems
Future trends in robotic control systems emphasize the integration of reactive control's real-time responsiveness with deliberative control's complex decision-making capabilities, enabling robots to operate more autonomously in dynamic environments. Advances in machine learning and sensor fusion are driving the development of hybrid control architectures that balance immediate sensory feedback with long-term planning. These innovations aim to enhance adaptability, improve task performance, and expand applications in fields such as autonomous vehicles, industrial automation, and service robotics.
Reactive control vs Deliberative control Infographic