Payload capacity and reach are critical factors in robotics design, directly influencing a robot's efficiency and application scope. Higher payload capacity often requires stronger actuators and robust materials, which can limit the maximum reach due to increased weight and energy consumption. Optimizing the balance between payload and reach ensures precise handling capabilities while maintaining operational flexibility in industrial environments.
Table of Comparison
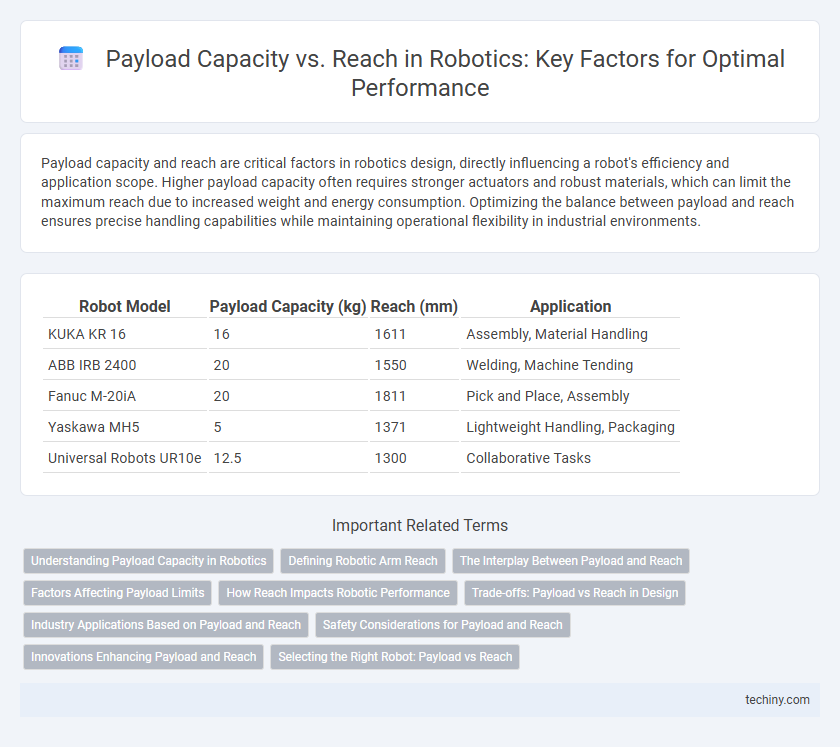
| Robot Model | Payload Capacity (kg) | Reach (mm) | Application |
|---|---|---|---|
| KUKA KR 16 | 16 | 1611 | Assembly, Material Handling |
| ABB IRB 2400 | 20 | 1550 | Welding, Machine Tending |
| Fanuc M-20iA | 20 | 1811 | Pick and Place, Assembly |
| Yaskawa MH5 | 5 | 1371 | Lightweight Handling, Packaging |
| Universal Robots UR10e | 12.5 | 1300 | Collaborative Tasks |
Understanding Payload Capacity in Robotics
Payload capacity in robotics refers to the maximum weight a robot can handle while maintaining precision and stability. It directly impacts the robot's reach, as heavier payloads often reduce the effective range of motion due to structural and mechanical limitations. Evaluating payload capacity ensures optimal performance for specific applications, balancing load weight and operational reach.
Defining Robotic Arm Reach
Robotic arm reach refers to the maximum horizontal distance a robotic arm can extend from its base to interact with objects within its workspace. This parameter critically influences the arm's ability to perform tasks that require accessing wide or hard-to-reach areas, directly impacting the operational efficiency. Payload capacity often inversely correlates with reach; as reach increases, the arm's ability to support heavier loads typically decreases due to mechanical and stability constraints.
The Interplay Between Payload and Reach
Payload capacity and reach in robotics are intrinsically linked, as increasing the reach of a robotic arm often results in a decreased payload capacity due to leverage and structural limitations. Engineers must carefully balance these parameters to optimize performance for specific applications, ensuring that the robot can handle the required load at desired distances without compromising stability or precision. Advanced materials and design techniques continue to push the boundaries, enabling robots to achieve greater reach while maintaining substantial payload capacities.
Factors Affecting Payload Limits
Payload capacity in robotics is influenced by factors such as arm length, joint torque, and material strength, which collectively determine the maximum weight a robot can handle at varying reaches. Longer reach typically reduces payload capacity due to increased leverage and mechanical stress on actuators and structural components. Design considerations, including motor power, gear ratios, and structural reinforcements, play crucial roles in balancing payload limits with desired reach for optimal performance.
How Reach Impacts Robotic Performance
Robotic reach significantly influences payload capacity by dictating the effective range and leverage a robot can exert during operations. As reach increases, the mechanical stress and torque on arm joints escalate, often requiring reduced payloads to maintain precision and system stability. Optimizing the balance between reach and payload capacity enhances robotic performance by ensuring consistent accuracy and durability in applications such as assembly, material handling, and welding.
Trade-offs: Payload vs Reach in Design
In robotics design, the trade-off between payload capacity and reach is critical, as increasing reach often reduces the robot's maximum payload due to structural and motor limitations. Engineers must balance the arm length and load-bearing components to optimize performance without compromising stability or precision. Selecting materials and actuator strength directly influences the robot's ability to maintain payload capacity at extended reaches for industrial automation applications.
Industry Applications Based on Payload and Reach
Robotic arms in industrial applications are selected based on a balance between payload capacity and reach to optimize performance in tasks like assembly, welding, and material handling. High payload capacity robots are essential for heavy-duty operations such as automotive manufacturing, while extended reach robots are preferred in large-scale warehousing and packaging systems. Understanding the specific payload and reach requirements enhances efficiency, reduces operational costs, and ensures precision in diverse manufacturing environments.
Safety Considerations for Payload and Reach
Payload capacity and reach directly influence the safety parameters of robotic operations, as exceeding specified payload limits can cause mechanical stress and potential failure. Ensuring the payload remains within the manufacturer's maximum rated capacity minimizes risks of structural damage and maintains the robot's positional accuracy during extended reach tasks. Rigorous assessment of both payload weight and arm extension length is essential to prevent tipping hazards and ensure operator safety in automated environments.
Innovations Enhancing Payload and Reach
Recent innovations in robotics have significantly enhanced payload capacity and reach through advanced lightweight materials and improved actuator designs. Integration of AI-powered control systems optimizes load distribution and movement precision, enabling robots to handle heavier payloads at extended reaches without compromising stability. These advancements facilitate more versatile applications in manufacturing and logistics, pushing the boundaries of robotic performance.
Selecting the Right Robot: Payload vs Reach
Selecting the right robot requires balancing payload capacity and reach to meet specific application demands effectively. Robots with higher payload capacities are essential for handling heavier objects but often have reduced reach or require more robust mechanical designs. Evaluating task requirements for weight and distance ensures optimal robot performance, efficiency, and safety in industrial and automation environments.
Payload Capacity vs Reach Infographic