Teleoperation enables precise human control of robots in complex or unpredictable environments, ensuring safety and adaptability. Autonomy allows robots to perform tasks independently using sensors and AI, increasing efficiency and scalability. Balancing teleoperation and autonomy enhances robotic system performance across diverse applications.
Table of Comparison
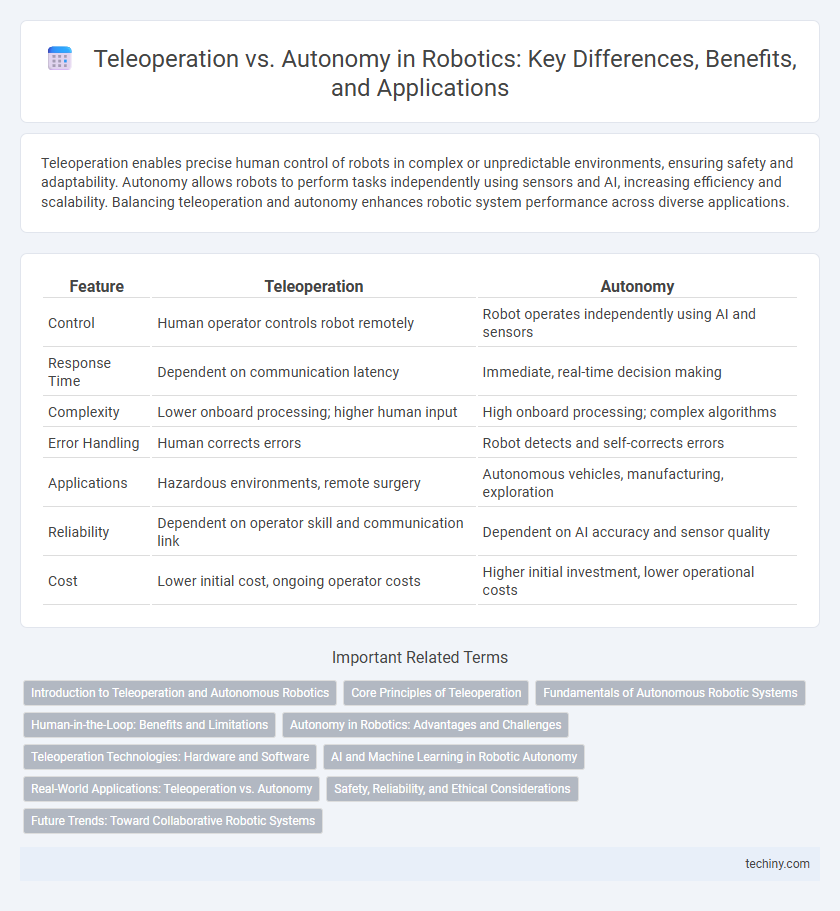
| Feature | Teleoperation | Autonomy |
|---|---|---|
| Control | Human operator controls robot remotely | Robot operates independently using AI and sensors |
| Response Time | Dependent on communication latency | Immediate, real-time decision making |
| Complexity | Lower onboard processing; higher human input | High onboard processing; complex algorithms |
| Error Handling | Human corrects errors | Robot detects and self-corrects errors |
| Applications | Hazardous environments, remote surgery | Autonomous vehicles, manufacturing, exploration |
| Reliability | Dependent on operator skill and communication link | Dependent on AI accuracy and sensor quality |
| Cost | Lower initial cost, ongoing operator costs | Higher initial investment, lower operational costs |
Introduction to Teleoperation and Autonomous Robotics
Teleoperation in robotics involves remote control of robots by human operators, enabling real-time decision-making and adaptability in complex or hazardous environments. Autonomous robotics relies on advanced algorithms, machine learning, and sensors to perform tasks independently without continuous human intervention. Both teleoperation and autonomy are critical for expanding robotic applications across industries like manufacturing, healthcare, and exploration.
Core Principles of Teleoperation
Teleoperation relies on direct human control and real-time feedback to navigate and manipulate robots in complex or unpredictable environments, ensuring precise task execution. Key principles include low-latency communication, intuitive human-machine interfaces, and robust sensory feedback systems to maintain situational awareness and control accuracy. These core elements enable effective remote operation where full autonomy is limited by environmental variability or technical constraints.
Fundamentals of Autonomous Robotic Systems
Fundamentals of autonomous robotic systems emphasize perception, decision-making, and control to enable robots to operate without human intervention. Teleoperation relies on real-time human input through remote control, limiting scalability and response time, whereas autonomy allows for continuous operation in complex, dynamic environments. Key technologies include sensor fusion, machine learning algorithms, and robust feedback control systems to achieve reliable and adaptive robotic autonomy.
Human-in-the-Loop: Benefits and Limitations
Human-in-the-loop teleoperation in robotics enhances system adaptability by leveraging human judgment for complex decision-making tasks, leading to improved precision and safety in dynamic environments. This approach ensures real-time human oversight, reducing risks associated with fully autonomous systems such as unforeseen obstacles or ethical dilemmas. However, reliance on human operators introduces challenges like latency issues, operator fatigue, and limited scalability for large-scale applications.
Autonomy in Robotics: Advantages and Challenges
Autonomy in robotics enables machines to perform complex tasks independently, enhancing efficiency and reducing human intervention in hazardous environments. Advanced algorithms in machine learning and sensor integration facilitate real-time decision-making, improving adaptability and precision. Challenges include ensuring robust perception under variable conditions, managing unpredictable environments, and addressing ethical considerations in autonomous decision processes.
Teleoperation Technologies: Hardware and Software
Teleoperation technologies integrate advanced hardware such as haptic devices, master controllers, and immersive virtual reality interfaces to enable precise remote manipulation in robotics. Software components rely on real-time data transmission protocols, sophisticated sensor fusion algorithms, and adaptive control systems to ensure seamless interaction and feedback between human operators and robotic platforms. These technologies are critical in applications requiring human judgment and dexterity, including medical robotics, hazardous environment operations, and remote exploration.
AI and Machine Learning in Robotic Autonomy
Robotic autonomy leverages AI and machine learning algorithms to enable robots to interpret sensory data, make decisions, and adapt to dynamic environments without human intervention. Machine learning models enhance perception, path planning, and manipulation tasks by continuously improving performance through experience and data-driven learning. Compared to teleoperation, autonomous robots reduce latency, increase operational efficiency, and perform complex tasks in unstructured settings by relying on real-time AI-driven insights.
Real-World Applications: Teleoperation vs. Autonomy
Teleoperation enables precise human control in hazardous or unstructured environments, such as deep-sea exploration and disaster response, where real-time decision-making is critical. Autonomous systems excel in predictable, repetitive tasks like warehouse logistics and agricultural monitoring, leveraging AI for efficiency and scalability. Combining teleoperation with autonomy enhances robotic performance by allowing human intervention during complex scenarios while maximizing automated operation in routine conditions.
Safety, Reliability, and Ethical Considerations
Teleoperation in robotics offers enhanced safety by allowing human operators to control robots remotely, reducing exposure to hazardous environments and mitigating risk. Autonomous systems improve reliability through advanced sensor integration and machine learning algorithms, enabling consistent, real-time decision-making without human intervention. Ethical considerations emphasize transparency, accountability, and the minimization of biases in autonomous systems, while teleoperation requires robust communication protocols to prevent misuse or human error.
Future Trends: Toward Collaborative Robotic Systems
Future trends in robotics emphasize the integration of teleoperation and autonomy to create collaborative robotic systems that enhance human-robot interaction and efficiency. Advanced AI algorithms enable robots to seamlessly switch between autonomous functions and human control, improving adaptability in dynamic environments. The convergence of sensor fusion, real-time data processing, and machine learning drives the evolution of hybrid systems optimizing productivity in manufacturing, healthcare, and remote exploration.
teleoperation vs autonomy Infographic