Simultaneous Localization and Mapping (SLAM) integrates sensor data to build a map of an unknown environment while simultaneously tracking the robot's position, enabling adaptive navigation in dynamic spaces. Dead reckoning estimates the robot's position based solely on its previous location and motion data, which often accumulates errors over time due to sensor drift and wheel slippage. SLAM's ability to correct positional inconsistencies in real-time provides more reliable and accurate navigation compared to dead reckoning's reliance on incremental motion calculations.
Table of Comparison
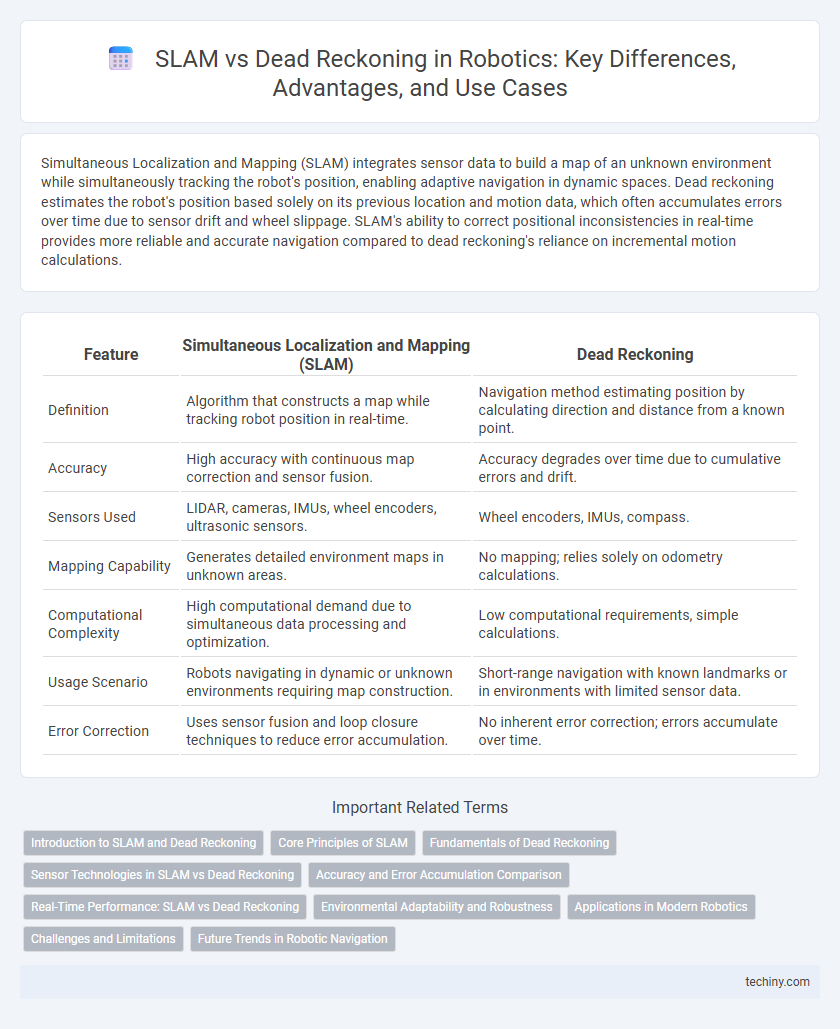
| Feature | Simultaneous Localization and Mapping (SLAM) | Dead Reckoning |
|---|---|---|
| Definition | Algorithm that constructs a map while tracking robot position in real-time. | Navigation method estimating position by calculating direction and distance from a known point. |
| Accuracy | High accuracy with continuous map correction and sensor fusion. | Accuracy degrades over time due to cumulative errors and drift. |
| Sensors Used | LIDAR, cameras, IMUs, wheel encoders, ultrasonic sensors. | Wheel encoders, IMUs, compass. |
| Mapping Capability | Generates detailed environment maps in unknown areas. | No mapping; relies solely on odometry calculations. |
| Computational Complexity | High computational demand due to simultaneous data processing and optimization. | Low computational requirements, simple calculations. |
| Usage Scenario | Robots navigating in dynamic or unknown environments requiring map construction. | Short-range navigation with known landmarks or in environments with limited sensor data. |
| Error Correction | Uses sensor fusion and loop closure techniques to reduce error accumulation. | No inherent error correction; errors accumulate over time. |
Introduction to SLAM and Dead Reckoning
Simultaneous Localization and Mapping (SLAM) enables robots to build a map of an unknown environment while simultaneously tracking their location within it using sensor data and probabilistic algorithms. Dead reckoning estimates a robot's current position based on its previous position and known motion inputs, but it accumulates significant error over time due to sensor noise and wheel slippage. SLAM offers more accurate and robust navigation compared to dead reckoning, making it essential for autonomous systems operating in complex or dynamic environments.
Core Principles of SLAM
Simultaneous Localization and Mapping (SLAM) integrates sensor data and motion estimates to construct a map of an unknown environment while simultaneously determining the robot's position within it, leveraging probabilistic algorithms such as Extended Kalman Filters or Particle Filters. SLAM fuses inputs from range finders, cameras, or LiDAR with odometry to correct cumulative errors inherent in Dead reckoning, enabling robust real-time navigation and environment mapping in dynamic or GPS-denied settings. Core principles of SLAM emphasize continuous state estimation, loop closure detection for drift reduction, and mapping consistency, making it superior to Dead reckoning which relies solely on incremental position updates prone to error accumulation.
Fundamentals of Dead Reckoning
Dead reckoning in robotics involves calculating the current position based on previously known coordinates, direction, and velocity, using sensor data such as wheel encoders and inertial measurement units (IMUs). Unlike SLAM, which builds a map while localizing within it using sensor fusion from sources like LiDAR or cameras, dead reckoning relies solely on internal measurements without external environmental mapping. This fundamental approach is prone to cumulative errors over time due to sensor drift and wheel slippage, making it less accurate without correction mechanisms.
Sensor Technologies in SLAM vs Dead Reckoning
Simultaneous Localization and Mapping (SLAM) leverages advanced sensor technologies such as LiDAR, RGB-D cameras, and ultrasonic sensors to build real-time environmental maps and localize the robot simultaneously, ensuring higher accuracy and adaptability in dynamic settings. In contrast, dead reckoning primarily relies on wheel encoders, gyroscopes, and inertial measurement units (IMUs), which provide relative position estimates prone to cumulative drift over time without external references. The integration of multi-modal sensor fusion in SLAM greatly enhances robustness and precision compared to the limited sensor suite of dead reckoning systems.
Accuracy and Error Accumulation Comparison
Simultaneous Localization and Mapping (SLAM) offers higher accuracy in robotics navigation by continuously updating and correcting the robot's position using sensor data and environmental mapping, reducing cumulative errors. In contrast, dead reckoning relies on integrating motion data, such as wheel encoders or inertial measurements, which tends to accumulate drift and positional errors over time without external corrections. SLAM's dynamic environment modeling mitigates error accumulation effectively, whereas dead reckoning's error grows proportionally with the distance traveled and time elapsed.
Real-Time Performance: SLAM vs Dead Reckoning
Simultaneous Localization and Mapping (SLAM) delivers real-time environmental mapping by integrating sensor data and pose estimation, enabling robots to navigate dynamically changing environments with high accuracy. Dead reckoning estimates position based on pre-known velocity and direction data without external references, which can lead to cumulative errors in real-time applications. SLAM outperforms dead reckoning in real-time performance by continuously correcting localization errors through sensor fusion and map updates.
Environmental Adaptability and Robustness
Simultaneous Localization and Mapping (SLAM) offers superior environmental adaptability by continuously updating maps and correcting position estimates in dynamic and unknown environments. Dead reckoning relies on sensor data like wheel encoders and inertial measurement units, making it prone to cumulative errors and less robust in complex or changing surroundings. SLAM's ability to integrate sensor fusion and real-time data processing significantly enhances robustness and accuracy in diverse robotic applications.
Applications in Modern Robotics
Simultaneous Localization and Mapping (SLAM) enables robots to build detailed maps and localize themselves in unknown environments, making it essential for autonomous navigation in drones, self-driving cars, and robotic vacuum cleaners. Dead reckoning relies on estimated position based on motion sensors and is commonly used for short-term navigation or as a backup when GPS or SLAM data is unavailable. SLAM outperforms dead reckoning in accuracy and adaptability, particularly in complex or dynamic settings where real-time mapping and obstacle avoidance are critical.
Challenges and Limitations
SLAM faces challenges such as sensor noise, dynamic environments, and computational complexity, which can lead to inaccuracies in the constructed maps and pose estimation. Dead reckoning suffers from cumulative errors due to wheel slippage and sensor drift, causing significant localization drift over time without external corrections. Both methods are limited by their dependence on sensor quality and environmental conditions, making hybrid approaches essential for robust and reliable robot navigation.
Future Trends in Robotic Navigation
Future trends in robotic navigation emphasize the integration of advanced Simultaneous Localization and Mapping (SLAM) techniques with sensor fusion to enhance accuracy and real-time environment mapping. While dead reckoning remains useful for short-term position estimation, SLAM's ability to dynamically build and update maps enables robots to navigate complex, unstructured environments more effectively. Emerging technologies like AI-driven SLAM algorithms and multi-modal sensor networks are set to revolutionize autonomous navigation by improving robustness in GPS-denied or dynamic settings.
Simultaneous Localization and Mapping (SLAM) vs Dead reckoning Infographic