Manipulation planning involves determining how a robot interacts with objects to achieve a specific task, focusing on grasping, positioning, and force application. Motion planning concentrates on generating collision-free paths for the robot's movements within its environment. Effective robotic systems integrate both manipulation and motion planning to ensure precise and efficient task execution.
Table of Comparison
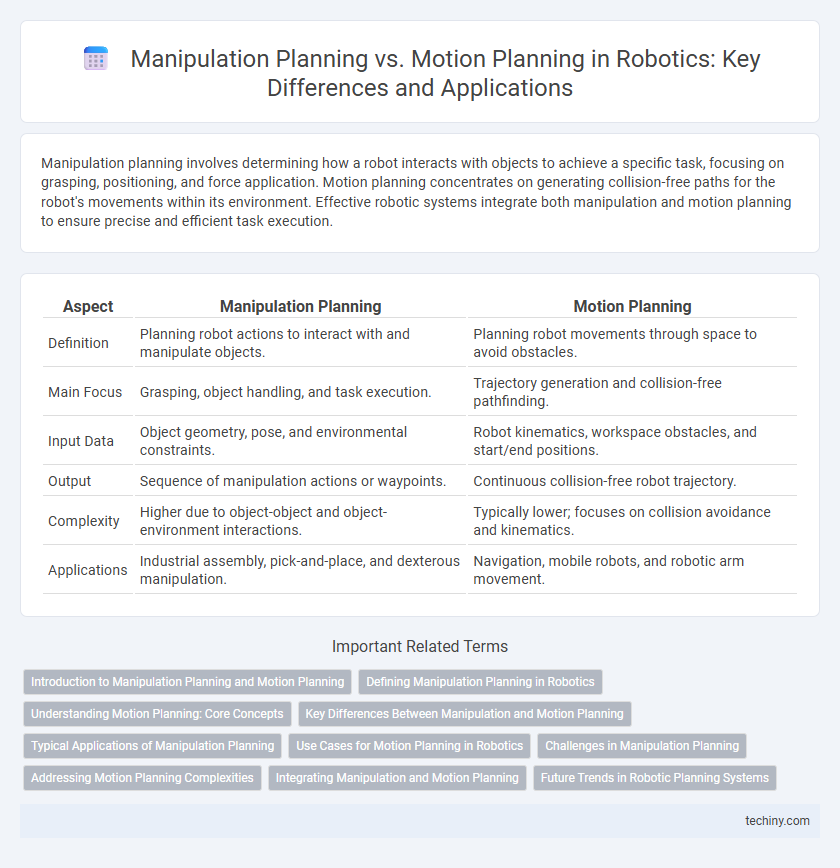
| Aspect | Manipulation Planning | Motion Planning |
|---|---|---|
| Definition | Planning robot actions to interact with and manipulate objects. | Planning robot movements through space to avoid obstacles. |
| Main Focus | Grasping, object handling, and task execution. | Trajectory generation and collision-free pathfinding. |
| Input Data | Object geometry, pose, and environmental constraints. | Robot kinematics, workspace obstacles, and start/end positions. |
| Output | Sequence of manipulation actions or waypoints. | Continuous collision-free robot trajectory. |
| Complexity | Higher due to object-object and object-environment interactions. | Typically lower; focuses on collision avoidance and kinematics. |
| Applications | Industrial assembly, pick-and-place, and dexterous manipulation. | Navigation, mobile robots, and robotic arm movement. |
Introduction to Manipulation Planning and Motion Planning
Manipulation planning focuses on determining a sequence of robot actions to interact with objects, emphasizing grasping, object handling, and tool usage within constrained environments. Motion planning involves computing feasible paths for a robot or its components to move from an initial state to a goal state while avoiding collisions and adhering to kinematic and dynamic constraints. Both fields address different aspects of robotic task execution, with manipulation planning integrating object interaction strategies and motion planning ensuring safe and efficient movements.
Defining Manipulation Planning in Robotics
Manipulation planning in robotics involves determining the sequence of actions a robot must execute to interact with objects, focusing on task-specific goals such as grasping, reorienting, or assembling parts. This process integrates environmental constraints and object properties to ensure successful physical interaction, differing from motion planning which primarily addresses collision-free robot movement through space. Key algorithms for manipulation planning often combine grasp synthesis, object pose estimation, and path planning to achieve complex manipulation tasks in dynamic settings.
Understanding Motion Planning: Core Concepts
Motion planning is a critical aspect of robotics focused on computing feasible paths for a robot to move from an initial to a target configuration while avoiding obstacles. This process involves algorithms such as sampling-based planners (e.g., RRT, PRM) that explore the robot's configuration space to ensure collision-free trajectories. Understanding motion planning requires grasping key concepts like configuration space, path feasibility, and obstacle avoidance to enable efficient and safe robot navigation.
Key Differences Between Manipulation and Motion Planning
Manipulation planning focuses on the interaction between a robot and objects within its environment, emphasizing grasping, pushing, and object placement tasks. Motion planning, in contrast, centers on computing feasible trajectories for the robot's body or end-effector to reach a target configuration while avoiding collisions. Key differences include manipulation planning's consideration of object dynamics and grasp stability, whereas motion planning primarily addresses kinematic constraints and obstacle avoidance.
Typical Applications of Manipulation Planning
Manipulation planning is essential in robotic tasks involving object handling, such as assembly, packaging, and surgical robotics, where precise control over grasping and object interaction is required. It enables robots to plan sequences of actions for object reorientation, insertion, or tool usage, optimizing fine motor skills beyond simple movement. Typical applications include industrial automation, service robots performing household chores, and collaborative robots assisting in medical procedures.
Use Cases for Motion Planning in Robotics
Motion planning in robotics is crucial for enabling robots to navigate complex environments, avoid obstacles, and execute precise movements required in tasks such as autonomous driving, warehouse automation, and robotic arm navigation. It focuses on generating feasible paths that ensure collision-free and efficient trajectories, essential in dynamic or cluttered spaces. Applications include drone navigation, service robots moving through populated areas, and robotic vehicles performing delivery or inspection tasks.
Challenges in Manipulation Planning
Manipulation planning faces significant challenges due to the complexity of interacting with diverse objects and the need to consider grasp stability, force constraints, and object dynamics simultaneously. Unlike motion planning, which primarily deals with navigating a robot through space, manipulation planning must integrate sensing uncertainties and real-time adjustment to dynamic environments. The high-dimensional configuration space and the need for precise control in object manipulation increase computational demands and complicate the development of robust algorithms.
Addressing Motion Planning Complexities
Manipulation planning integrates motion planning with object interactions to handle intricate tasks involving grasping, reorienting, and tool use, addressing higher-dimensional configuration spaces and dynamic constraints. It leverages advanced algorithms like sampling-based planners and optimization methods to navigate narrow passages and avoid collisions in cluttered environments. Challenges in motion planning complexity are mitigated through task-specific heuristics and hierarchical decomposition, enabling efficient computation amid uncertainty and real-time constraints.
Integrating Manipulation and Motion Planning
Integrating manipulation planning and motion planning enhances robotic efficiency by synchronizing grasp strategies with path trajectories to ensure seamless task execution. Advanced algorithms combine kinematic constraints and environmental interactions, optimizing both the robot's end-effector configurations and collision-free movements. This integration improves robotic adaptability in complex environments, leading to more robust and precise manipulation outcomes.
Future Trends in Robotic Planning Systems
Future trends in robotic planning systems emphasize the integration of manipulation planning with motion planning to enhance efficiency and adaptability in complex tasks. Advances in machine learning and real-time sensory feedback are enabling more precise and context-aware manipulation strategies that reduce computational overhead. Research is increasingly focused on developing unified frameworks that seamlessly blend kinematic constraints with dynamic environmental changes to improve autonomous decision-making in robots.
Manipulation planning vs Motion planning Infographic