Mapping creates detailed representations of an environment using sensors, enabling robots to understand and navigate unknown spaces. Localization uses these maps to determine the robot's precise position within the environment in real time. Accurate mapping enhances localization accuracy, allowing robots to perform complex tasks with greater efficiency.
Table of Comparison
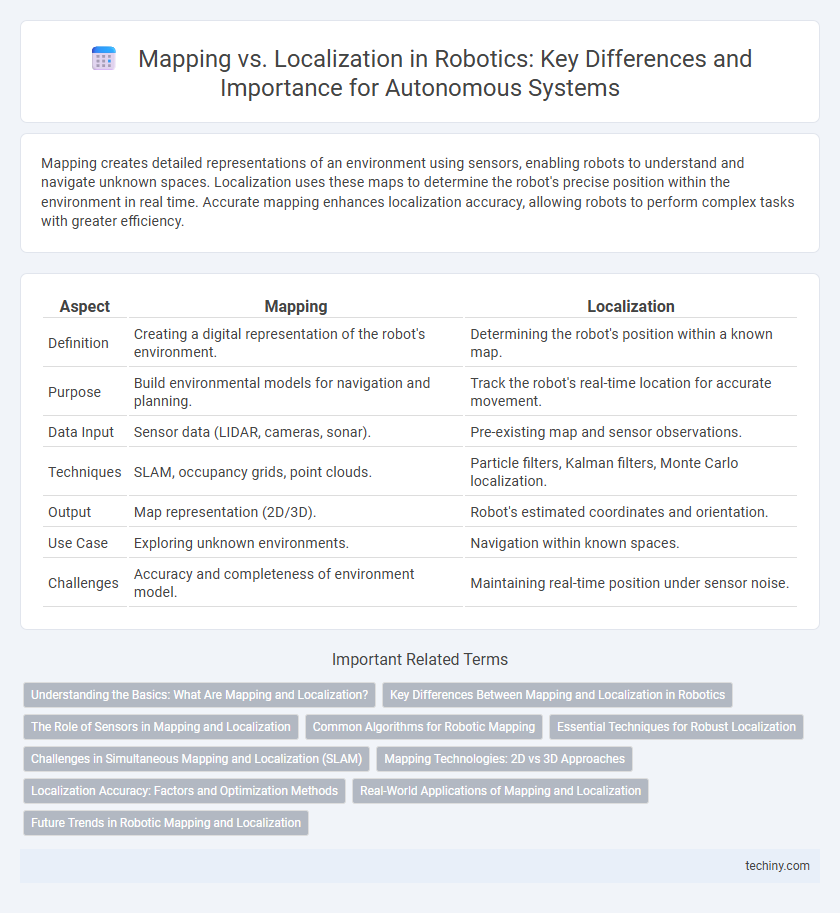
| Aspect | Mapping | Localization |
|---|---|---|
| Definition | Creating a digital representation of the robot's environment. | Determining the robot's position within a known map. |
| Purpose | Build environmental models for navigation and planning. | Track the robot's real-time location for accurate movement. |
| Data Input | Sensor data (LIDAR, cameras, sonar). | Pre-existing map and sensor observations. |
| Techniques | SLAM, occupancy grids, point clouds. | Particle filters, Kalman filters, Monte Carlo localization. |
| Output | Map representation (2D/3D). | Robot's estimated coordinates and orientation. |
| Use Case | Exploring unknown environments. | Navigation within known spaces. |
| Challenges | Accuracy and completeness of environment model. | Maintaining real-time position under sensor noise. |
Understanding the Basics: What Are Mapping and Localization?
Mapping in robotics refers to the process of creating a spatial representation of the environment using sensor data, enabling robots to comprehend their surroundings. Localization involves determining a robot's precise position within that mapped environment by comparing sensor inputs to the existing map. Understanding the interplay between mapping and localization is essential for autonomous navigation and effective robot operation.
Key Differences Between Mapping and Localization in Robotics
Mapping in robotics involves creating a spatial representation of an environment, enabling robots to understand and navigate unfamiliar areas by building a detailed map. Localization refers to the robot's ability to determine its precise position within a predefined map, critical for accurate movement and task execution. While mapping focuses on environmental data acquisition and structure generation, localization emphasizes real-time position estimation and pose tracking within the existing spatial framework.
The Role of Sensors in Mapping and Localization
Sensors such as LiDAR, cameras, and ultrasonic rangefinders play a critical role in robotics by capturing environmental data essential for both mapping and localization. In mapping, sensors gather spatial information to create detailed, real-time representations of surroundings, enabling robots to navigate and interact effectively. For localization, sensor data is processed to determine a robot's precise position within a pre-existing map, ensuring accurate movement and task execution in dynamic environments.
Common Algorithms for Robotic Mapping
Common algorithms for robotic mapping include SLAM (Simultaneous Localization and Mapping), which integrates sensor data to build a map while tracking the robot's position. Graph-based SLAM uses a graph to represent spatial relationships, optimizing localization and map accuracy through loop closure detection. Occupancy grid mapping converts sensor inputs into probabilistic grids that distinguish between free, occupied, and unknown spaces for effective environment representation.
Essential Techniques for Robust Localization
Robust localization in robotics relies heavily on techniques such as simultaneous localization and mapping (SLAM), particle filters, and extended Kalman filters to accurately estimate a robot's position within an environment. High-precision sensors like LiDAR and visual odometry enhance mapping quality, enabling reliable data association and loop closure detection essential for correcting drift and reducing localization errors. Integrating probabilistic algorithms with real-time sensor fusion establishes a resilient framework for navigation in dynamic and unstructured settings.
Challenges in Simultaneous Mapping and Localization (SLAM)
Simultaneous Localization and Mapping (SLAM) faces significant challenges due to sensor noise, dynamic environments, and computational complexity. Accurate data association remains difficult when features are ambiguous or environments change, leading to mapping errors and localization drift. Robust algorithms must efficiently handle real-time updates while maintaining precision in robot pose estimation and map accuracy.
Mapping Technologies: 2D vs 3D Approaches
2D mapping technologies in robotics leverage laser scanners and sonar sensors to create flat, planar representations of environments, suitable for navigation in relatively simple or indoor spaces. In contrast, 3D mapping utilizes LiDAR, RGB-D cameras, and stereo vision systems to generate detailed, volumetric maps that capture spatial dimensions, enabling finer object recognition and maneuvering in complex, unstructured environments. The choice between 2D and 3D mapping depends on application requirements, computational resources, and environmental complexity, with 3D approaches providing enhanced accuracy and situational awareness.
Localization Accuracy: Factors and Optimization Methods
Localization accuracy in robotics depends on sensor precision, environmental features, and algorithm robustness. Techniques such as particle filters, extended Kalman filters, and simultaneous localization and mapping (SLAM) optimize position estimates by integrating noisy sensor data. Enhancing accuracy involves sensor fusion, real-time data processing, and adaptive algorithms that adjust to dynamic environments to reduce errors and improve robot navigation.
Real-World Applications of Mapping and Localization
Mapping enables autonomous robots to generate detailed spatial representations critical for navigation in complex environments, such as warehouse logistics and urban search and rescue. Localization allows robots to accurately determine their position within these maps, ensuring precise path planning and obstacle avoidance in dynamic, real-world settings. Combined, these technologies enhance robotic efficiency and safety in applications like self-driving cars, agricultural automation, and industrial inspection.
Future Trends in Robotic Mapping and Localization
Emerging trends in robotic mapping and localization emphasize the integration of AI-driven simultaneous localization and mapping (SLAM) techniques to enhance real-time environmental understanding. Advances in multi-sensor fusion combining LiDAR, visual cameras, and inertial measurement units (IMUs) improve accuracy and robustness in dynamic and complex environments. Future developments prioritize decentralized and cloud-based processing architectures to enable scalable, collaborative robot navigation and autonomous decision-making.
Mapping vs Localization Infographic