Centralized control in robotics involves a single processing unit managing all robot functions, allowing for streamlined decision-making and easier system monitoring. Decentralized control distributes processing power across multiple units, enabling faster responses and greater system robustness by reducing dependency on a single point of failure. Choosing between these control architectures depends on factors like system complexity, scalability, and fault tolerance requirements.
Table of Comparison
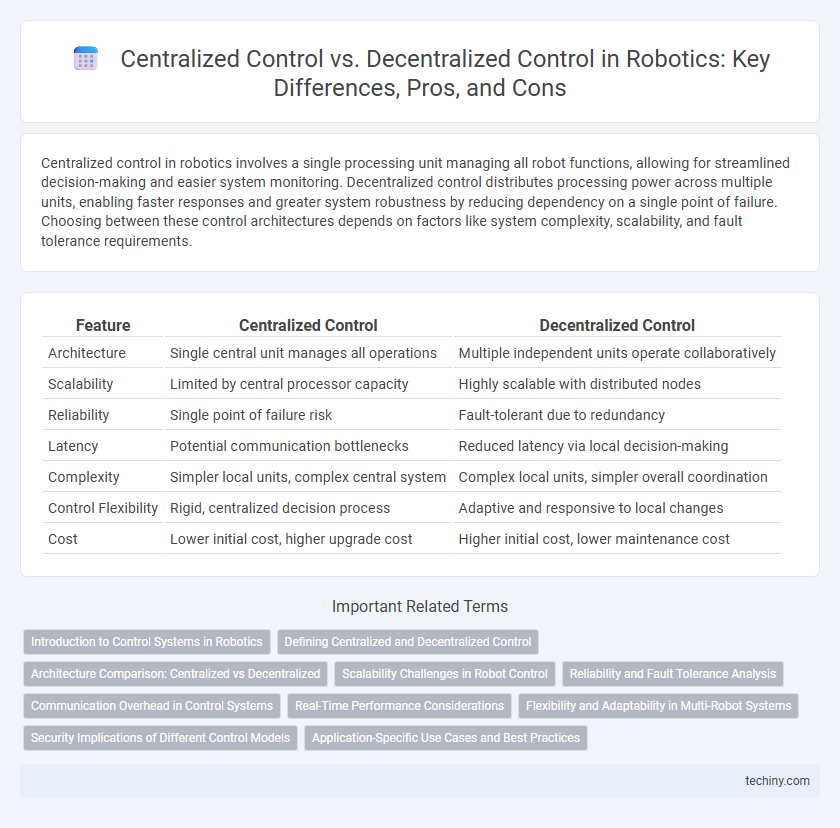
| Feature | Centralized Control | Decentralized Control |
|---|---|---|
| Architecture | Single central unit manages all operations | Multiple independent units operate collaboratively |
| Scalability | Limited by central processor capacity | Highly scalable with distributed nodes |
| Reliability | Single point of failure risk | Fault-tolerant due to redundancy |
| Latency | Potential communication bottlenecks | Reduced latency via local decision-making |
| Complexity | Simpler local units, complex central system | Complex local units, simpler overall coordination |
| Control Flexibility | Rigid, centralized decision process | Adaptive and responsive to local changes |
| Cost | Lower initial cost, higher upgrade cost | Higher initial cost, lower maintenance cost |
Introduction to Control Systems in Robotics
Centralized control systems in robotics rely on a single processor to manage all robot components, offering streamlined decision-making and simplified communication. Decentralized control distributes processing across multiple nodes or agents, enhancing fault tolerance and scalability in complex robotic applications. Understanding these control architectures is essential for optimizing robotic performance, flexibility, and reliability in diverse environments.
Defining Centralized and Decentralized Control
Centralized control in robotics refers to a system where a single, central processor manages all decision-making and coordination tasks, ensuring unified command and simplified system monitoring. Decentralized control distributes decision-making across multiple autonomous agents or subsystems, enhancing scalability, robustness, and fault tolerance by allowing independent operation. Understanding these control architectures is crucial for optimizing robot performance in varying applications such as automated manufacturing, swarm robotics, and autonomous vehicles.
Architecture Comparison: Centralized vs Decentralized
Centralized control architecture in robotics relies on a single processing unit to manage all decision-making and coordination tasks, enabling streamlined communication but risking a single point of failure. Decentralized control distributes processing across multiple agents or nodes, enhancing system robustness, scalability, and fault tolerance through local decision-making and cooperative behavior. Comparing these architectures, centralized systems offer simplified maintenance and global optimization, whereas decentralized systems excel in adaptability and resilience in dynamic environments.
Scalability Challenges in Robot Control
Centralized control systems in robotics often face scalability limitations due to increased communication bandwidth demand and processing bottlenecks as the number of robots grows. Decentralized control architectures distribute decision-making, reducing single points of failure and improving robustness, but they require sophisticated coordination algorithms to maintain system coherence. Efficient scalability in robot control relies on balancing communication overhead with autonomy, enabling large-scale multi-robot systems to operate effectively in dynamic environments.
Reliability and Fault Tolerance Analysis
Centralized control systems in robotics offer simplified coordination but pose a single point of failure, impacting overall reliability. Decentralized control enhances fault tolerance by distributing decision-making across multiple units, allowing continued operation despite individual component failures. Evaluating fault tolerance involves analyzing system redundancy and communication robustness to ensure resilient robotic performance.
Communication Overhead in Control Systems
Centralized control systems in robotics often face significant communication overhead due to reliance on a single processing unit that manages all sensor data and actuator commands, creating bottlenecks and latency in large-scale or complex environments. Decentralized control distributes processing tasks across multiple agents or nodes, reducing communication load by enabling local decision-making and enhancing scalability and robustness. Efficient communication protocols and data aggregation techniques are critical in minimizing overhead and ensuring real-time performance in both centralized and decentralized robotic control architectures.
Real-Time Performance Considerations
Centralized control systems in robotics often face latency and bottleneck issues due to reliance on a single processing unit, which can hinder real-time responsiveness in dynamic environments. Decentralized control distributes computational tasks across multiple nodes, enhancing fault tolerance and reducing communication delays to improve real-time performance. Effective real-time decision-making in robotic applications depends on optimizing control architecture to balance processing speed and system robustness.
Flexibility and Adaptability in Multi-Robot Systems
Decentralized control in multi-robot systems enhances flexibility by allowing individual robots to make autonomous decisions based on local data, enabling rapid adaptation to dynamic environments. Centralized control, while offering coordinated task execution through a central processor, often suffers from bottlenecks and reduced responsiveness when facing unexpected changes. Consequently, decentralized architectures are more effective for applications requiring real-time adaptability and robust fault tolerance in complex, unpredictable scenarios.
Security Implications of Different Control Models
Centralized control systems in robotics present single points of failure, increasing vulnerability to cyberattacks that can compromise entire robot networks. Decentralized control distributes processing across multiple nodes, enhancing resilience and reducing the risk of widespread security breaches. Incorporating encryption and authentication protocols in both models is essential to safeguard sensitive robotic operations against unauthorized access.
Application-Specific Use Cases and Best Practices
Centralized control in robotics excels in applications requiring tight coordination and real-time data aggregation, such as industrial automation and surgical robots, where a single control unit optimizes efficiency and accuracy. Decentralized control suits swarm robotics, autonomous vehicles, and distributed sensor networks, enabling robust, scalable systems through local decision-making and fault tolerance. Best practices involve leveraging centralized control for deterministic performance in structured environments, while adopting decentralized architectures for flexibility and resilience in dynamic, large-scale robotic systems.
Centralized control vs Decentralized control Infographic