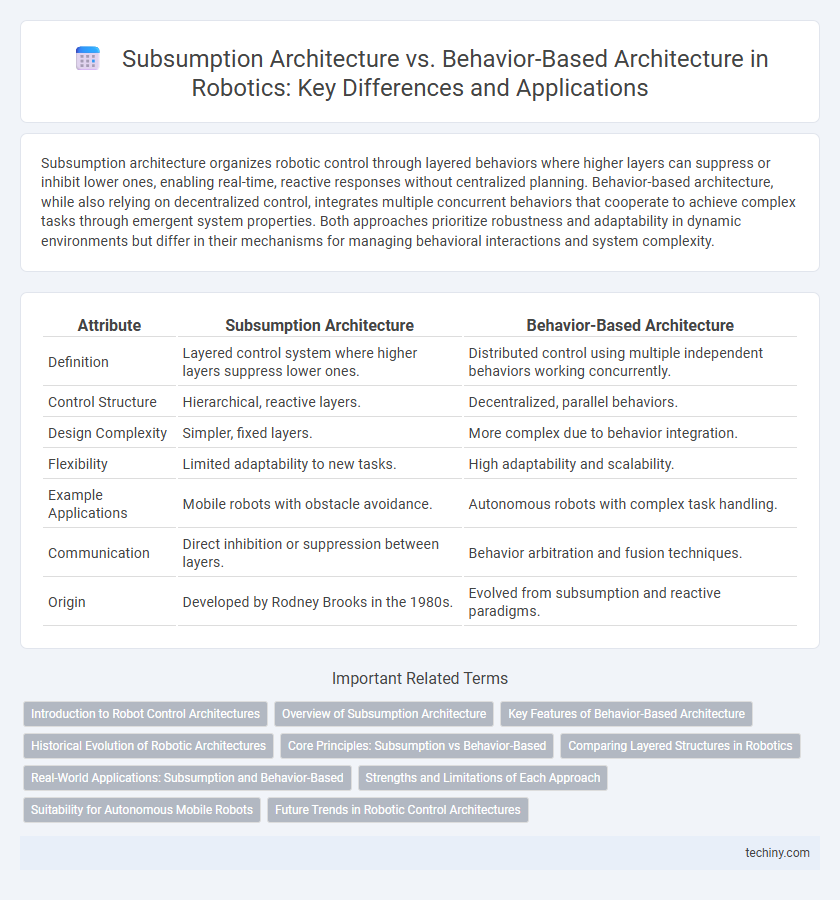
Subsumption architecture organizes robotic control through layered behaviors where higher layers can suppress or inhibit lower ones, enabling real-time, reactive responses without centralized planning. Behavior-based architecture, while also relying on decentralized control, integrates multiple concurrent behaviors that cooperate to achieve complex tasks through emergent system properties. Both approaches prioritize robustness and adaptability in dynamic environments but differ in their mechanisms for managing behavioral interactions and system complexity.
Table of Comparison
| Attribute | Subsumption Architecture | Behavior-Based Architecture |
|---|---|---|
| Definition | Layered control system where higher layers suppress lower ones. | Distributed control using multiple independent behaviors working concurrently. |
| Control Structure | Hierarchical, reactive layers. | Decentralized, parallel behaviors. |
| Design Complexity | Simpler, fixed layers. | More complex due to behavior integration. |
| Flexibility | Limited adaptability to new tasks. | High adaptability and scalability. |
| Example Applications | Mobile robots with obstacle avoidance. | Autonomous robots with complex task handling. |
| Communication | Direct inhibition or suppression between layers. | Behavior arbitration and fusion techniques. |
| Origin | Developed by Rodney Brooks in the 1980s. | Evolved from subsumption and reactive paradigms. |
Introduction to Robot Control Architectures
Subsumption architecture organizes robot control into layered behaviors where higher layers can suppress lower ones, enabling real-time reactive decision-making without central planning. Behavior-based architecture emphasizes modular, parallel behaviors working simultaneously, allowing robots to adapt flexibly to dynamic environments through decentralized control. Both architectures prioritize robustness and scalability in autonomous robot navigation and task execution.
Overview of Subsumption Architecture
Subsumption architecture is a layered control system developed by Rodney Brooks that emphasizes decentralized, reactive behaviors in robots, allowing lower layers to operate independently from higher layers. Each layer corresponds to a specific behavior, such as obstacle avoidance or exploration, and higher layers can suppress or subsume the commands of lower layers without requiring a global world model. This approach enhances real-time responsiveness and robustness in dynamic environments by relying on simple, modular behavior units rather than complex planning algorithms.
Key Features of Behavior-Based Architecture
Behavior-based architecture emphasizes modular, decentralized control through multiple concurrent behavior modules that interact directly with the environment. These architectures prioritize real-time responsiveness and adaptability by using sensor-driven behaviors rather than relying on a central symbolic planner. Key features include emergent behavior from simple rules, scalability through adding or modifying behaviors, and robustness against sensor noise and hardware failures.
Historical Evolution of Robotic Architectures
Subsumption architecture, introduced by Rodney Brooks in the 1980s, pioneered a layered control system where simple behaviors operate independently without central planning, enabling robust, real-time responses in robots. Behavior-based architecture evolved from this foundation, integrating multiple concurrent behaviors with context-driven arbitration mechanisms to enhance adaptability in complex environments. This historical progression highlights a shift from rigid hierarchical control to flexible, decentralized behavior coordination in robotic systems.
Core Principles: Subsumption vs Behavior-Based
Subsumption architecture organizes robot control through layered behaviors where higher layers can suppress lower ones, enabling real-time reactive responses without central processing. Behavior-based architecture emphasizes decentralized control with multiple independent modules simultaneously influencing actions, promoting robustness and flexibility in dynamic environments. Both architectures prioritize emergent behavior from simple interactions but differ in structure, with subsumption relying on hierarchical suppression and behavior-based on cooperative parallelism.
Comparing Layered Structures in Robotics
Subsumption architecture features a strict layered structure where higher layers can suppress or inhibit lower layers, enabling reactive control without complex internal models. Behavior-based architecture employs loosely coupled modules that interact more flexibly, allowing for emergent behaviors through parallel processing. This comparison highlights subsumption's predictable, hierarchical control versus behavior-based systems' adaptability and robustness in dynamic environments.
Real-World Applications: Subsumption and Behavior-Based
Subsumption architecture excels in reactive robotics, enabling autonomous navigation and obstacle avoidance through layered, simple behaviors that prioritize real-time environmental responsiveness. Behavior-based architecture integrates multiple concurrent behaviors, allowing robots in complex applications like search and rescue to exhibit adaptability and robustness in dynamic, unstructured environments. Both architectures are widely implemented in service robots, industrial automation, and mobile robotics, optimizing task efficiency and environmental interaction.
Strengths and Limitations of Each Approach
Subsumption architecture excels in real-time reactive behaviors by layering simple modules, ensuring robust performance in dynamic environments with minimal computational demands. Behavior-based architecture offers greater flexibility by integrating multiple behavior layers that allow for more complex and adaptive robotic actions, though it can require higher processing power and more intricate design. While subsumption architecture struggles with planning and coordination due to its strict hierarchy, behavior-based systems face challenges in behavior arbitration and potential conflicts between concurrent behaviors.
Suitability for Autonomous Mobile Robots
Subsumption architecture offers a reactive, layered control system that enables autonomous mobile robots to quickly respond to environmental changes without the need for complex internal models. Behavior-based architecture integrates multiple behavior modules that operate concurrently, allowing for more flexible and adaptable decision-making in dynamic and unpredictable environments. Suitability depends on task complexity: subsumption excels in simple, real-time obstacle avoidance, while behavior-based systems provide enhanced navigation and goal-oriented behaviors for advanced autonomous mobility.
Future Trends in Robotic Control Architectures
Subsumption architecture, characterized by layered, reactive behaviors, provides robustness and real-time adaptability, while behavior-based architecture integrates more complex, modular behaviors enabling flexible task execution. Emerging trends emphasize hybrid models combining deliberative and reactive layers to enhance autonomy and learning capabilities. Advances in AI and sensor fusion technologies drive the evolution towards scalable, context-aware robotic control architectures.
Subsumption architecture vs Behavior-based architecture Infographic