Teleoperation enables remote human control of robots, allowing precise manipulation in complex or hazardous environments where real-time decision-making is critical. Supervised autonomy combines autonomous robot functions with human oversight, enhancing efficiency while maintaining safety through periodic human intervention. Balancing these approaches optimizes operational effectiveness by leveraging human judgment and autonomous capabilities in robotics applications.
Table of Comparison
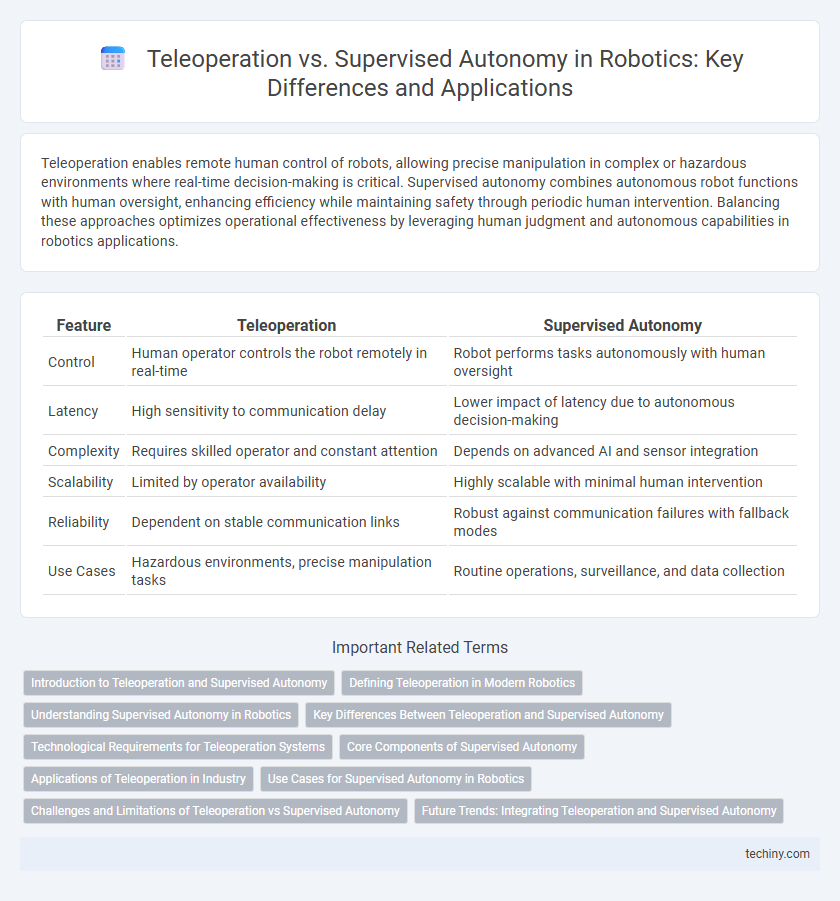
| Feature | Teleoperation | Supervised Autonomy |
|---|---|---|
| Control | Human operator controls the robot remotely in real-time | Robot performs tasks autonomously with human oversight |
| Latency | High sensitivity to communication delay | Lower impact of latency due to autonomous decision-making |
| Complexity | Requires skilled operator and constant attention | Depends on advanced AI and sensor integration |
| Scalability | Limited by operator availability | Highly scalable with minimal human intervention |
| Reliability | Dependent on stable communication links | Robust against communication failures with fallback modes |
| Use Cases | Hazardous environments, precise manipulation tasks | Routine operations, surveillance, and data collection |
Introduction to Teleoperation and Supervised Autonomy
Teleoperation involves remote control of robots by human operators, allowing real-time interaction and precise manipulation in complex or hazardous environments. Supervised autonomy combines autonomous robotic functions with human oversight, enabling robots to perform tasks independently while humans intervene as necessary for decision-making or correction. Both approaches enhance operational efficiency and safety, with teleoperation offering direct control and supervised autonomy providing scalable automation.
Defining Teleoperation in Modern Robotics
Teleoperation in modern robotics involves remotely controlling robots via real-time human input, enabling precise manipulation in environments that are hazardous or inaccessible to humans. This method relies on advanced communication technologies and sensory feedback to bridge the gap between operator commands and robotic actions. The integration of teleoperation systems with haptic feedback and augmented reality enhances operator situational awareness and control accuracy, differentiating it from supervised autonomy which delegates more decision-making to the robot itself.
Understanding Supervised Autonomy in Robotics
Supervised autonomy in robotics involves human operators monitoring and guiding robot actions while allowing the system to perform tasks independently within defined parameters. This approach balances the precision of human judgment with the efficiency of autonomous decision-making, enhancing performance in complex or dynamic environments. In contrast to teleoperation, supervised autonomy reduces continuous manual control, increasing scalability and adaptability in applications such as industrial automation, drone navigation, and surgical robotics.
Key Differences Between Teleoperation and Supervised Autonomy
Teleoperation involves a human operator directly controlling a robot in real-time, allowing precise manual intervention for complex tasks. Supervised autonomy enables robots to perform predefined actions independently while a human oversees and intervenes only when necessary, enhancing efficiency and reducing operator workload. The key differences lie in control dynamics, with teleoperation demanding continuous human input and supervised autonomy relying on robust algorithms to handle routine operations.
Technological Requirements for Teleoperation Systems
Teleoperation systems require high-bandwidth, low-latency communication networks to enable real-time control and feedback between the operator and the robot. Advanced sensory integration, including multi-modal cameras and haptic feedback devices, is essential for precise remote manipulation and situational awareness. Robust cybersecurity protocols protect teleoperation channels from interference or unauthorized access, ensuring safe and reliable robot operation in critical environments.
Core Components of Supervised Autonomy
Core components of supervised autonomy in robotics include advanced perception systems, real-time data processing, and adaptive decision-making algorithms, enabling partial automation with human oversight. Teleoperation relies heavily on direct human control through remote interfaces, whereas supervised autonomy integrates sensor fusion and machine learning models to perform tasks independently while allowing human intervention. This hybrid approach optimizes efficiency and safety by combining robotic precision with human judgment.
Applications of Teleoperation in Industry
Teleoperation in industry enables remote control of machinery and robots in hazardous environments such as nuclear plants, underwater exploration, and deep mining operations, enhancing worker safety and operational precision. It is widely applied in sectors like manufacturing, where operators guide robotic arms for intricate assembly tasks requiring human judgment beyond autonomous capabilities. This technology also facilitates real-time intervention in logistics and material handling, improving flexibility and reducing downtime in automated warehouses.
Use Cases for Supervised Autonomy in Robotics
Supervised autonomy in robotics is pivotal for complex industrial applications such as automated assembly lines and precision agriculture, where human oversight ensures safety and accuracy. Use cases include warehouse automation, where robots navigate dynamic environments with human intervention to manage exceptions, and remote inspection tasks in hazardous settings like nuclear plants, combining autonomous operations with real-time human control. These scenarios optimize operational efficiency while leveraging human judgment to handle unpredictable situations.
Challenges and Limitations of Teleoperation vs Supervised Autonomy
Teleoperation faces significant challenges such as latency issues, limited bandwidth, and operator fatigue, which can reduce precision and responsiveness in complex environments. Supervised autonomy struggles with limitations related to sensor reliability, algorithmic accuracy, and the difficulty of real-time decision-making in unpredictable scenarios. Both approaches require robust cybersecurity measures to prevent unauthorized control and ensure system integrity.
Future Trends: Integrating Teleoperation and Supervised Autonomy
Future trends in robotics emphasize integrating teleoperation with supervised autonomy to enhance precision and adaptability in complex environments. Combining real-time human input with autonomous decision-making enables robots to perform intricate tasks while maintaining safety and efficiency. Advances in AI, sensor fusion, and high-bandwidth communication networks are driving this hybrid approach, expanding applications in industries such as manufacturing, healthcare, and remote exploration.
Teleoperation vs Supervised autonomy Infographic