Sensing redundancy in robotics enhances system reliability by providing multiple sensory inputs to detect environmental conditions accurately, ensuring fault tolerance in perception. Actuation redundancy involves using extra actuators to maintain motion control and operation despite individual actuator failures, improving mechanical robustness. Balancing sensing redundancy with actuation redundancy optimizes overall robot performance and fault resilience in complex environments.
Table of Comparison
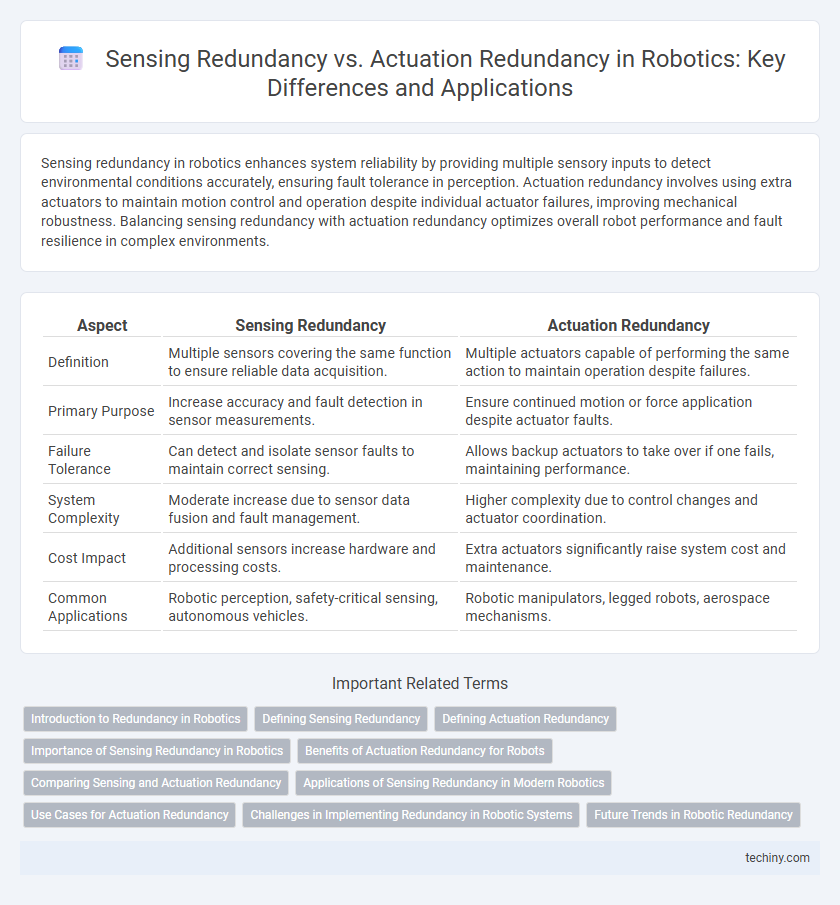
| Aspect | Sensing Redundancy | Actuation Redundancy |
|---|---|---|
| Definition | Multiple sensors covering the same function to ensure reliable data acquisition. | Multiple actuators capable of performing the same action to maintain operation despite failures. |
| Primary Purpose | Increase accuracy and fault detection in sensor measurements. | Ensure continued motion or force application despite actuator faults. |
| Failure Tolerance | Can detect and isolate sensor faults to maintain correct sensing. | Allows backup actuators to take over if one fails, maintaining performance. |
| System Complexity | Moderate increase due to sensor data fusion and fault management. | Higher complexity due to control changes and actuator coordination. |
| Cost Impact | Additional sensors increase hardware and processing costs. | Extra actuators significantly raise system cost and maintenance. |
| Common Applications | Robotic perception, safety-critical sensing, autonomous vehicles. | Robotic manipulators, legged robots, aerospace mechanisms. |
Introduction to Redundancy in Robotics
Sensing redundancy in robotics involves integrating multiple sensors to enhance reliability and accuracy of environmental perception, ensuring fault tolerance in data acquisition. Actuation redundancy refers to incorporating extra actuators or degrees of freedom, enabling robots to maintain performance despite individual actuator failures or to optimize movements for precision and flexibility. Both forms of redundancy improve robustness and fault tolerance, but sensing redundancy primarily addresses information reliability, while actuation redundancy focuses on mechanical control and adaptability.
Defining Sensing Redundancy
Sensing redundancy in robotics refers to the incorporation of multiple sensors to measure the same physical parameter, enhancing the reliability and accuracy of robot perception systems. This redundancy allows for error detection, fault tolerance, and data validation by cross-checking sensor outputs, crucial in dynamic and uncertain environments. In contrast to actuation redundancy, which involves multiple actuators for fault resilience and improved force control, sensing redundancy is primarily focused on robust data acquisition and environment understanding.
Defining Actuation Redundancy
Actuation redundancy in robotics refers to the inclusion of extra actuators beyond the minimum required to control a robot's degrees of freedom, enhancing reliability and fault tolerance. This approach improves the robot's ability to maintain performance despite actuator failures by redistributing control commands among the remaining functional actuators. In contrast to sensing redundancy, which focuses on multiple sensors for accurate perception, actuation redundancy emphasizes mechanical and control system robustness to ensure continuous operation.
Importance of Sensing Redundancy in Robotics
Sensing redundancy in robotics ensures increased reliability and accuracy by providing multiple data sources from diverse sensors, which enhances fault detection and system robustness. Unlike actuation redundancy that primarily focuses on maintaining motion capability, sensing redundancy ensures precise environmental perception critical for adaptive decision-making and safety. Incorporating redundant sensors such as lidar, cameras, and IMUs enables robots to function effectively even if one sensor fails or provides noisy data.
Benefits of Actuation Redundancy for Robots
Actuation redundancy in robots enhances fault tolerance by allowing continued operation even if one actuator fails, significantly improving system reliability. It provides increased flexibility in motion control, enabling robots to perform complex tasks with greater precision and adaptability. This redundancy also contributes to load distribution among actuators, reducing mechanical wear and extending the robot's operational lifespan.
Comparing Sensing and Actuation Redundancy
Sensing redundancy in robotics involves integrating multiple sensors to enhance data accuracy, reliability, and fault tolerance by cross-verifying environmental inputs, whereas actuation redundancy employs additional or backup actuators to ensure continuous robot motion and force application despite individual actuator failures. While sensing redundancy primarily improves perception and environmental awareness, actuation redundancy guarantees mechanical functionality and task execution under fault conditions. The strategic balance between sensing and actuation redundancy depends on mission-critical requirements, with sensing redundancy focusing on robust decision-making and actuation redundancy emphasizing operational resilience.
Applications of Sensing Redundancy in Modern Robotics
Sensing redundancy in modern robotics enhances system reliability by incorporating multiple sensors to provide overlapping environmental data, ensuring accurate perception despite individual sensor failures. Applications include autonomous vehicles, where LiDAR, radar, and cameras collectively improve obstacle detection and navigation under varying conditions. Industrial robots also leverage sensing redundancy for precision in tasks like assembly and quality control, minimizing errors through real-time sensor fusion.
Use Cases for Actuation Redundancy
Actuation redundancy in robotics enhances system reliability and fault tolerance by duplicating or adding extra actuators, allowing continuous operation despite actuator failures. This redundancy proves essential in high-stakes environments such as space exploration rovers, where mission-critical tasks depend on uninterrupted mobility and manipulation capabilities. Advanced prosthetics and collaborative robots also utilize actuation redundancy to ensure smooth, adaptive motion and maintain operational safety under variable load conditions.
Challenges in Implementing Redundancy in Robotic Systems
Sensing redundancy in robotic systems presents challenges such as increased data processing requirements and sensor fusion complexity, which can lead to latency and inconsistent readings. Actuation redundancy faces difficulties including mechanical integration, control strategy complexity, and increased system weight or cost. Balancing these redundancies requires advanced algorithms and optimized hardware design to maintain reliability without compromising performance or efficiency.
Future Trends in Robotic Redundancy
Future trends in robotic redundancy emphasize enhancing system reliability through integrated sensing redundancy, which improves environmental awareness and fault tolerance by deploying multiple, diverse sensors. Actuation redundancy is evolving to include modular and reconfigurable actuators, enabling robots to maintain functionality despite mechanical failures or variable load conditions. Advances in AI-driven adaptive control systems allow seamless coordination between sensing and actuation redundancies, optimizing performance and resilience in complex, dynamic environments.
Sensing redundancy vs actuation redundancy Infographic