Supervisory control in robotics involves high-level decision-making and task allocation, allowing operators to manage multiple robots or complex systems efficiently. In contrast, low-level control handles the real-time execution of robotic movements and responses through precise actuator commands and sensor feedback. Effective integration of both control levels is crucial for achieving autonomous and adaptive robotic performance in dynamic environments.
Table of Comparison
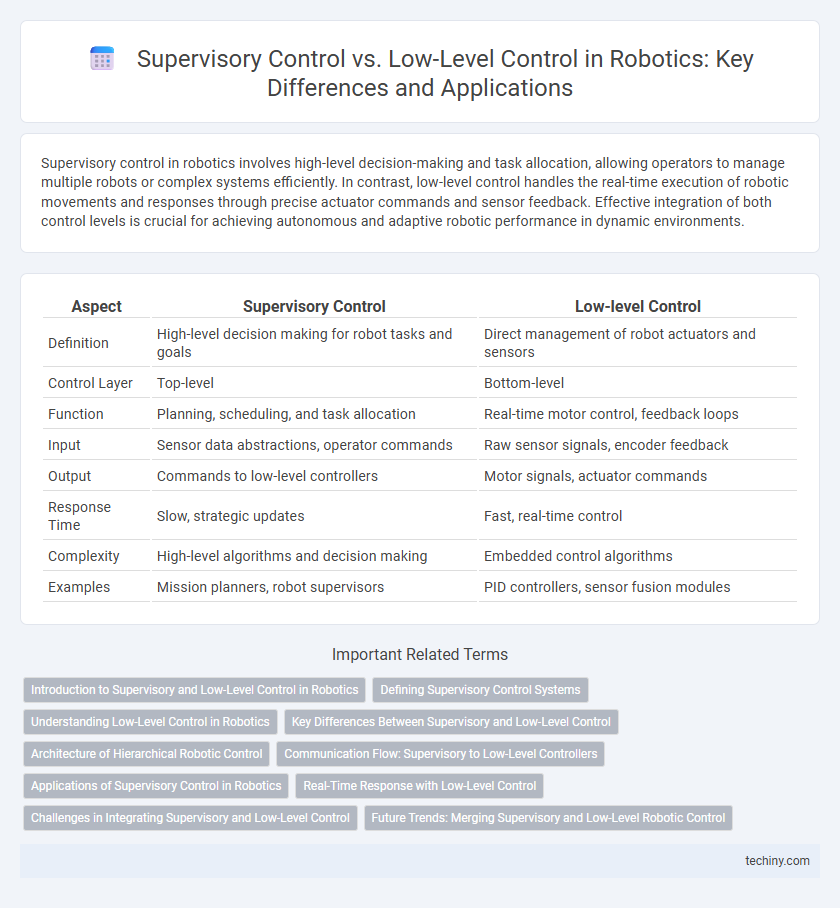
| Aspect | Supervisory Control | Low-level Control |
|---|---|---|
| Definition | High-level decision making for robot tasks and goals | Direct management of robot actuators and sensors |
| Control Layer | Top-level | Bottom-level |
| Function | Planning, scheduling, and task allocation | Real-time motor control, feedback loops |
| Input | Sensor data abstractions, operator commands | Raw sensor signals, encoder feedback |
| Output | Commands to low-level controllers | Motor signals, actuator commands |
| Response Time | Slow, strategic updates | Fast, real-time control |
| Complexity | High-level algorithms and decision making | Embedded control algorithms |
| Examples | Mission planners, robot supervisors | PID controllers, sensor fusion modules |
Introduction to Supervisory and Low-Level Control in Robotics
Supervisory control in robotics involves high-level decision-making processes that manage multiple tasks, plan actions, and ensure overall system coordination. Low-level control focuses on direct manipulation of robot actuators and sensors, executing precise commands to achieve immediate movements and responses. Understanding the distinction between these control layers is essential for designing efficient robotic systems that balance strategic planning with real-time execution.
Defining Supervisory Control Systems
Supervisory control systems in robotics manage high-level decision-making processes, coordinating multiple low-level control units responsible for real-time, precise operations such as motor actuation and sensor data processing. These systems enable complex task scheduling and adaptive behavior by interpreting environmental inputs and generating strategic commands, contrasting with the deterministic execution of low-level controls. Defining supervisory control involves understanding its role as an overarching framework that ensures robust, flexible, and efficient robot performance in dynamic environments.
Understanding Low-Level Control in Robotics
Low-level control in robotics involves the direct management of actuators and sensors to execute precise motor functions, such as joint positioning and force feedback. This control layer operates in real-time, handling tasks like velocity regulation and torque control to maintain stability and responsiveness. Understanding low-level control is essential for optimizing robot motion accuracy and ensuring seamless interaction between hardware components and higher-level planning algorithms.
Key Differences Between Supervisory and Low-Level Control
Supervisory control manages the overall mission planning and decision-making in a robotic system, focusing on high-level tasks such as path planning and task allocation. Low-level control handles real-time operations involving motor commands, sensor feedback, and precise actuator adjustments to execute the tasks assigned by the supervisory layer. The key difference lies in the abstraction level, with supervisory control operating on strategic coordination while low-level control ensures accurate execution of specific commands.
Architecture of Hierarchical Robotic Control
Hierarchical robotic control architecture organizes supervisory control to manage high-level decision-making, task allocation, and planning, while low-level control handles direct motor commands and sensor feedback for precise motion execution. Supervisory control relies on abstract representation of the environment and robot state, enabling adaptive and goal-directed behaviors, whereas low-level control ensures real-time responsiveness and stability through feedback loops. This division enhances system robustness, scalability, and flexibility in complex robotic operations.
Communication Flow: Supervisory to Low-Level Controllers
Supervisory control in robotics manages high-level decision-making and task planning, sending commands to low-level controllers responsible for real-time motor functions and sensor feedback processing. Communication flow from supervisory to low-level controllers involves transmitting abstract commands and coordination signals that low-level systems interpret into precise actuator movements. This hierarchical communication ensures efficient execution of complex tasks by combining strategic oversight with responsive, detailed motor control.
Applications of Supervisory Control in Robotics
Supervisory control in robotics is crucial for managing complex tasks like autonomous navigation, multi-robot coordination, and industrial automation, where high-level decision-making guides robotic systems. Applications involve overseeing robot fleets in warehouses, optimizing task allocation in manufacturing processes, and enabling human-in-the-loop control for precision surgery robots. This approach enhances system flexibility, scalability, and fault tolerance by abstracting control from low-level motor commands to strategic mission objectives.
Real-Time Response with Low-Level Control
Low-level control in robotics enables real-time response by directly managing actuators and sensors through continuous feedback loops, ensuring precise and immediate adjustments during operation. Unlike supervisory control, which handles high-level decision-making and task planning, low-level control functions at the hardware interface with strict timing constraints to maintain system stability and performance. This real-time responsiveness is crucial for applications like robotic manipulation and autonomous navigation, where split-second corrections prevent errors and enhance efficiency.
Challenges in Integrating Supervisory and Low-Level Control
Integrating supervisory control with low-level control in robotics presents challenges such as ensuring real-time communication and synchronization across hierarchical layers to maintain system stability and responsiveness. Differences in data abstraction and processing speeds between high-level decision-making and low-level actuator commands demand robust interface protocols and error-handling mechanisms. Managing conflicting priorities and heterogeneous control algorithms requires adaptive coordination strategies to achieve seamless collaboration between supervisory oversight and low-level execution.
Future Trends: Merging Supervisory and Low-Level Robotic Control
Future trends in robotics emphasize the integration of supervisory control with low-level control systems to enhance adaptive decision-making and real-time responsiveness. Advances in machine learning algorithms and sensor fusion enable seamless communication between high-level task planning and low-level actuator management, optimizing robotic precision and efficiency. This convergence facilitates more autonomous, flexible robots capable of complex behaviors in dynamic environments.
Supervisory control vs Low-level control Infographic