Force/torque control enables robots to adapt to dynamic environments by regulating the interaction forces between the robot and its surroundings, enhancing precision in tasks such as assembly or surface finishing. Position control focuses on moving the robot along predefined trajectories with high accuracy but lacks the ability to adjust to external forces, which can lead to errors or damage in delicate operations. Combining force/torque control with position control allows robots to achieve both accurate positioning and adaptable force regulation, improving overall task performance and flexibility.
Table of Comparison
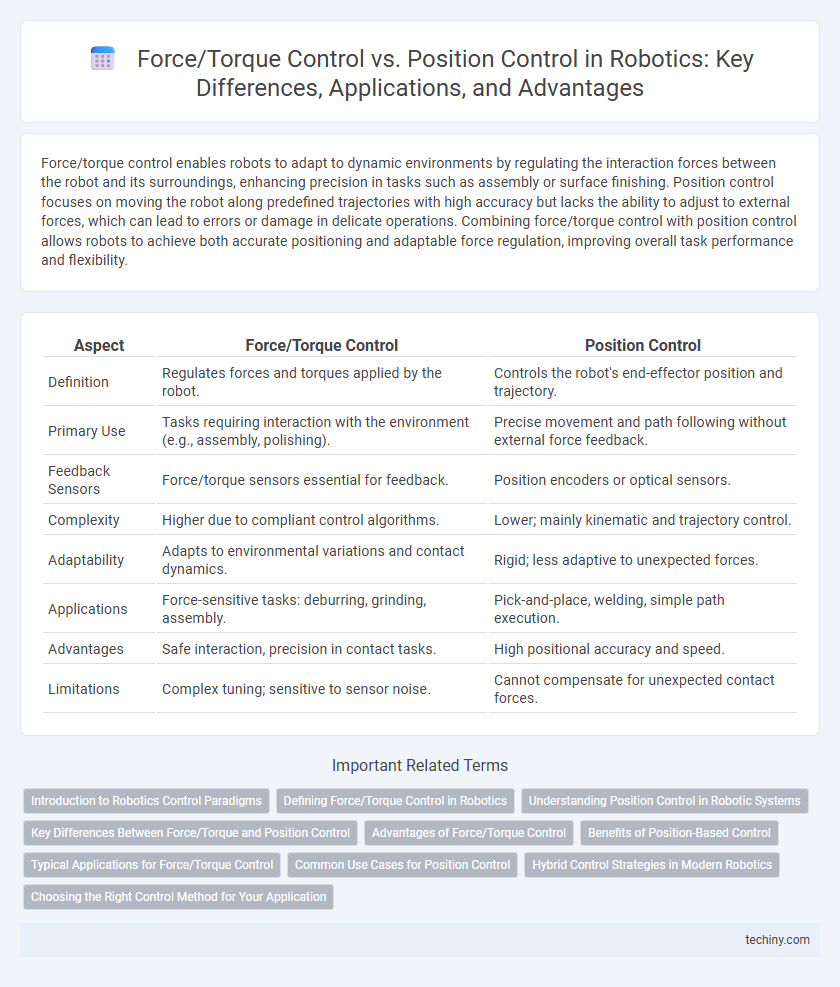
| Aspect | Force/Torque Control | Position Control |
|---|---|---|
| Definition | Regulates forces and torques applied by the robot. | Controls the robot's end-effector position and trajectory. |
| Primary Use | Tasks requiring interaction with the environment (e.g., assembly, polishing). | Precise movement and path following without external force feedback. |
| Feedback Sensors | Force/torque sensors essential for feedback. | Position encoders or optical sensors. |
| Complexity | Higher due to compliant control algorithms. | Lower; mainly kinematic and trajectory control. |
| Adaptability | Adapts to environmental variations and contact dynamics. | Rigid; less adaptive to unexpected forces. |
| Applications | Force-sensitive tasks: deburring, grinding, assembly. | Pick-and-place, welding, simple path execution. |
| Advantages | Safe interaction, precision in contact tasks. | High positional accuracy and speed. |
| Limitations | Complex tuning; sensitive to sensor noise. | Cannot compensate for unexpected contact forces. |
Introduction to Robotics Control Paradigms
Force/torque control in robotics precisely manages interaction forces between the robot and its environment, enabling tasks requiring delicate manipulation or compliance, such as assembly or surface finishing. In contrast, position control prioritizes accurate tracking of desired trajectories, ensuring the robot's end-effector follows predefined paths with minimal deviation, suitable for tasks like pick-and-place or welding. Understanding these control paradigms is essential for selecting appropriate strategies based on task requirements, robot dynamics, and environmental constraints in advanced robotic applications.
Defining Force/Torque Control in Robotics
Force/torque control in robotics involves regulating the interaction forces and torques between a robot and its environment to achieve precise manipulation tasks. This control strategy enables robots to perform complex operations such as assembly, surface finishing, and delicate handling by adapting to varying contact conditions. Unlike position control, which focuses solely on tracking predefined trajectories, force/torque control dynamically adjusts the robot's actions based on sensory feedback to maintain desired force levels.
Understanding Position Control in Robotic Systems
Position control in robotic systems involves precisely managing a robot's joint angles or end-effector coordinates to achieve a desired spatial configuration. It relies on feedback from encoders and sensors to correct deviations, ensuring accurate path following and stable motion execution. Unlike force/torque control, position control focuses on maintaining specific positions rather than responding to external forces or interactions.
Key Differences Between Force/Torque and Position Control
Force/torque control in robotics regulates the interaction forces between the robot and its environment, enabling compliant and adaptive motions crucial for tasks like assembly or surface finishing. Position control focuses on precise trajectory tracking and spatial accuracy, maintaining predefined paths regardless of external forces. The key difference lies in force/torque control's ability to modulate contact dynamics, while position control emphasizes strict positional accuracy without adjusting for force feedback.
Advantages of Force/Torque Control
Force/torque control enhances robotic precision in handling delicate or variable objects by adapting to external forces, reducing the risk of damage. It enables compliant interactions and better performance in unstructured environments compared to rigid position control. This method also improves task flexibility and safety during human-robot collaboration by dynamically adjusting grip and movement based on force feedback.
Benefits of Position-Based Control
Position-based control in robotics offers precise trajectory tracking and repeatability, essential for tasks requiring high accuracy such as assembly and machining. It simplifies the control architecture by directly commanding joint angles or end-effector positions, reducing computational complexity compared to force/torque control. This approach enhances stability and robustness in structured environments, making it ideal for industrial automation applications.
Typical Applications for Force/Torque Control
Force/torque control is essential in applications requiring interaction with uncertain or compliant environments, such as assembly, polishing, and surgical robotics. It enables precise manipulation by regulating the contact force, preventing damage to delicate objects and improving task accuracy. Typical uses include robotic grinding, inserting parts with tight tolerances, and adaptive grasping in complex, dynamic settings.
Common Use Cases for Position Control
Position control in robotics is primarily used in applications requiring precise path tracking and repeatability, such as pick-and-place operations, CNC machining, and robotic arm assembly tasks. It excels in scenarios where the robot's end-effector must follow a predetermined trajectory with high accuracy and minimal external force interaction. Position control is ideal for environments with stable, predictable dynamics and limited need for force feedback integration.
Hybrid Control Strategies in Modern Robotics
Hybrid control strategies in modern robotics integrate force/torque control with position control to enhance adaptability and precision in complex tasks. By dynamically adjusting force feedback alongside spatial positioning, these systems enable robots to perform delicate manipulation and interaction tasks in unstructured environments. This synergy improves performance in applications such as assembly, human-robot collaboration, and surface finishing, where both accurate positioning and controlled force are critical.
Choosing the Right Control Method for Your Application
Force/torque control offers precise manipulation in tasks involving variable contact forces, making it ideal for assembly, grinding, and delicate handling applications. Position control is more suitable for applications requiring accurate path following and repeatability, such as pick-and-place operations and welding. Selecting the right control method depends on the task's sensitivity to force interaction and the required precision in motion execution.
Force/torque control vs Position control Infographic