Humanoid robots mimic human appearance and movements, enabling seamless interaction in environments designed for humans and performing tasks that require anthropomorphic dexterity. Non-humanoid robots, often designed for specific industrial or specialized applications, prioritize function over form, offering enhanced efficiency and robustness in repetitive or hazardous tasks. The choice between humanoid and non-humanoid robots depends on the intended application, with humanoid robots excelling in human-centric roles and non-humanoid robots dominating in automated, precise operations.
Table of Comparison
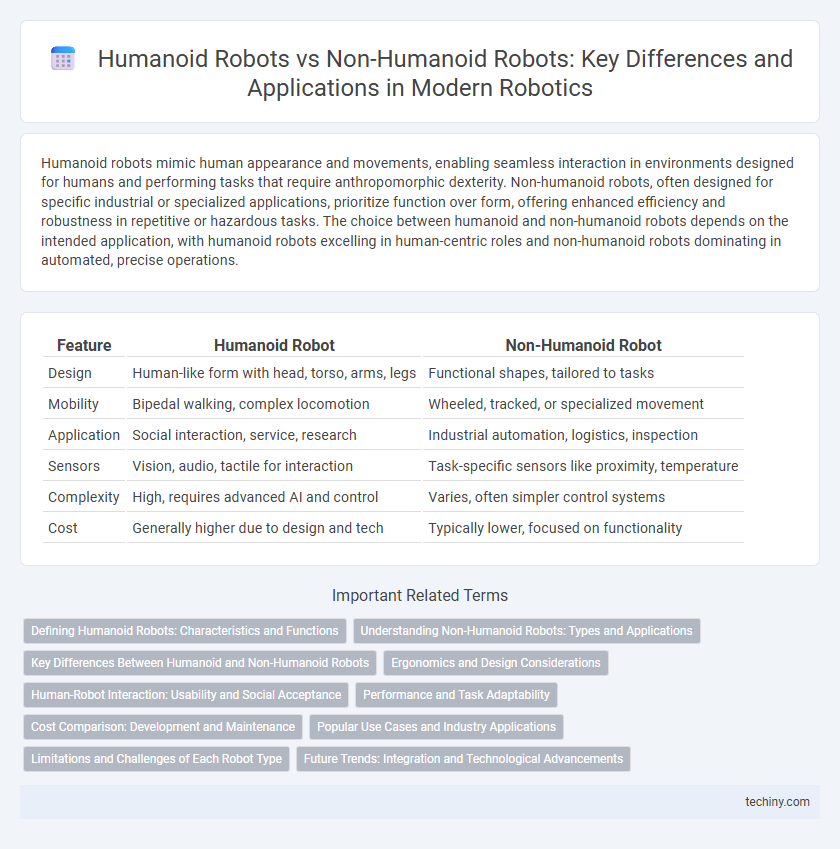
| Feature | Humanoid Robot | Non-Humanoid Robot |
|---|---|---|
| Design | Human-like form with head, torso, arms, legs | Functional shapes, tailored to tasks |
| Mobility | Bipedal walking, complex locomotion | Wheeled, tracked, or specialized movement |
| Application | Social interaction, service, research | Industrial automation, logistics, inspection |
| Sensors | Vision, audio, tactile for interaction | Task-specific sensors like proximity, temperature |
| Complexity | High, requires advanced AI and control | Varies, often simpler control systems |
| Cost | Generally higher due to design and tech | Typically lower, focused on functionality |
Defining Humanoid Robots: Characteristics and Functions
Humanoid robots are designed to resemble the human body, featuring a head, torso, arms, and legs to mimic human movement and interactions. They possess advanced sensors, artificial intelligence, and actuators enabling activities such as walking, grasping objects, and processing natural language. In contrast to non-humanoid robots, humanoid robots prioritize human-like appearance and behavior to improve user engagement and adaptability in environments designed for humans.
Understanding Non-Humanoid Robots: Types and Applications
Non-humanoid robots encompass a diverse range of designs, including industrial arms, autonomous drones, and mobile rovers, each optimized for specific tasks such as manufacturing, aerial surveillance, and planetary exploration. Unlike humanoid robots that mimic human appearance and movements, non-humanoid robots prioritize functionality and efficiency tailored to their operational environments. Their applications span sectors like logistics, agriculture, healthcare, and disaster response, where specialized locomotion and sensor integration enhance performance beyond human capabilities.
Key Differences Between Humanoid and Non-Humanoid Robots
Humanoid robots are designed to resemble the human body, featuring limbs, a head, and sometimes facial features, enabling them to perform tasks in human-centric environments and interact naturally with people. Non-humanoid robots vary widely in form and function, often optimized for specific industrial, agricultural, or exploratory tasks without the need for human-like appearance. Key differences include humanoid robots' emphasis on versatility and social interaction, while non-humanoid robots prioritize task-specific efficiency and adaptability to diverse operational settings.
Ergonomics and Design Considerations
Humanoid robots mimic human anatomy, enhancing ergonomic interaction by aligning with natural human posture and movements, which improves usability in social and assistive environments. Non-humanoid robots prioritize function-specific designs, often resulting in optimized performance for industrial tasks but limited adaptability in human-centric settings. Design considerations in humanoid robots emphasize joint articulation and sensor placements for intuitive user engagement, whereas non-humanoid robots focus on structural efficiency and task-specific tool integration.
Human-Robot Interaction: Usability and Social Acceptance
Humanoid robots, designed with human-like features, enhance human-robot interaction by facilitating intuitive communication through gestures and facial expressions, leading to higher social acceptance in environments like healthcare and education. Non-humanoid robots, often optimized for specific tasks with functional designs, prioritize efficiency and precision but may face challenges in social usability due to less natural interaction cues. Research indicates that the embodiment of humanoid characteristics significantly influences usability and user comfort, impacting the successful integration of robots in daily human activities.
Performance and Task Adaptability
Humanoid robots excel in tasks requiring human-like dexterity and social interaction, leveraging advanced sensors and articulated limbs to mimic human movements with high precision. Non-humanoid robots often outperform in specialized industrial applications due to their optimized designs for specific tasks, offering superior efficiency, speed, and payload capacity. The adaptability of humanoid robots enables them to navigate complex, unstructured environments, while non-humanoid robots deliver robust performance in repetitive, structured settings.
Cost Comparison: Development and Maintenance
Humanoid robots typically incur higher development costs due to their complex design, intricate joint mechanisms, and advanced sensory systems aimed at mimicking human movements. Non-humanoid robots benefit from simpler architectures and task-specific designs, resulting in lower initial investment and reduced maintenance expenses. Maintenance for humanoid robots often requires specialized technicians and replacement parts, whereas non-humanoid robots are easier to service with standardized components and modular configurations.
Popular Use Cases and Industry Applications
Humanoid robots excel in customer service, healthcare assistance, and entertainment due to their human-like interaction abilities, enhancing user experience in retail stores and hospitals. Non-humanoid robots dominate in manufacturing automation, logistics, and hazardous environment operations, where specialized designs optimize efficiency and safety. Industries such as automotive, aerospace, and warehousing prefer non-humanoid robots for precision tasks, while humanoid robots find growing applications in education and social robotics.
Limitations and Challenges of Each Robot Type
Humanoid robots face significant challenges in replicating complex human motor skills and facial expressions due to limitations in current actuator and sensor technologies, impacting their interaction capabilities. Non-humanoid robots, while often more effective in specialized tasks such as industrial automation, struggle with adaptability and versatility in unstructured environments compared to their humanoid counterparts. Both types encounter difficulties in energy efficiency and real-time decision-making, necessitating advancements in AI, power management, and materials engineering to overcome operational constraints.
Future Trends: Integration and Technological Advancements
Future trends in robotics emphasize enhanced integration between humanoid and non-humanoid robots, leveraging advancements in AI, sensor technology, and machine learning to expand functionality. Humanoid robots increasingly adopt sophisticated natural language processing and emotion recognition systems, enabling seamless human-robot interaction in service, healthcare, and education sectors. Non-humanoid robots benefit from modular architecture and autonomous navigation improvements, optimizing efficiency in industrial automation, logistics, and precision agriculture.
Humanoid robot vs Non-humanoid robot Infographic