Supervisory control in robotics allows operators to manage complex tasks by providing high-level commands that autonomous systems execute, optimizing efficiency and reducing operator workload. Direct teleoperation requires continuous manual input for robot movements, offering precise control but increasing cognitive demands and limiting operational scalability. Integrating supervisory control improves task management in dynamic environments while maintaining operator oversight for critical interventions.
Table of Comparison
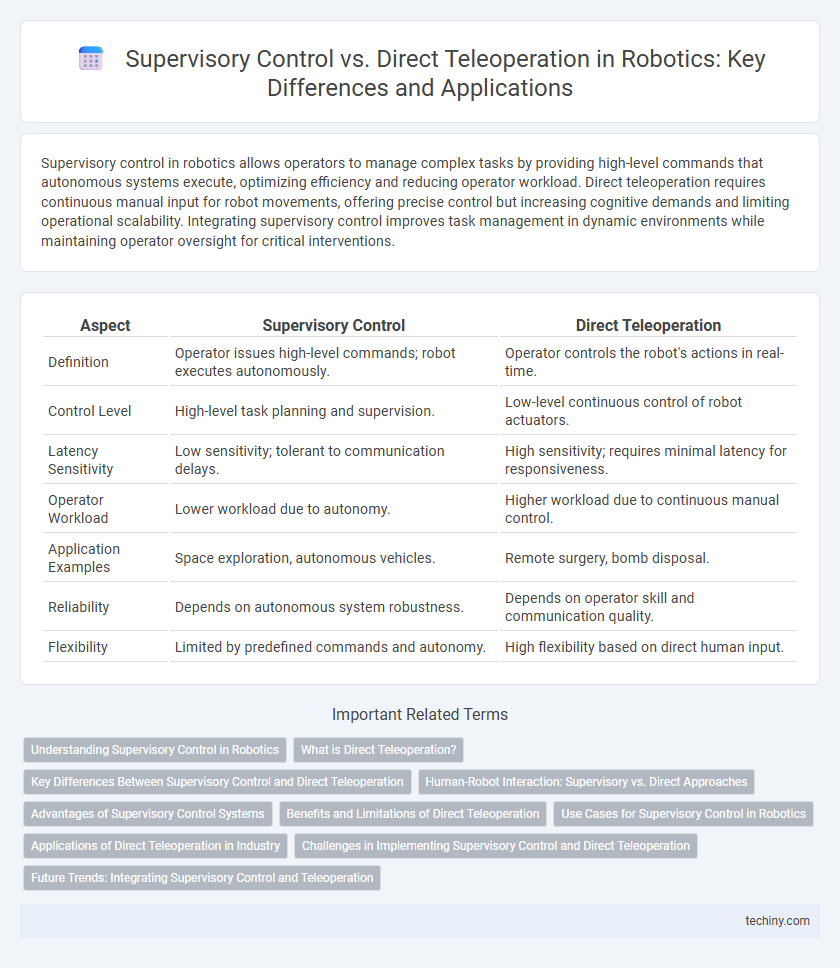
| Aspect | Supervisory Control | Direct Teleoperation |
|---|---|---|
| Definition | Operator issues high-level commands; robot executes autonomously. | Operator controls the robot's actions in real-time. |
| Control Level | High-level task planning and supervision. | Low-level continuous control of robot actuators. |
| Latency Sensitivity | Low sensitivity; tolerant to communication delays. | High sensitivity; requires minimal latency for responsiveness. |
| Operator Workload | Lower workload due to autonomy. | Higher workload due to continuous manual control. |
| Application Examples | Space exploration, autonomous vehicles. | Remote surgery, bomb disposal. |
| Reliability | Depends on autonomous system robustness. | Depends on operator skill and communication quality. |
| Flexibility | Limited by predefined commands and autonomy. | High flexibility based on direct human input. |
Understanding Supervisory Control in Robotics
Supervisory control in robotics involves a human operator providing high-level commands while the robot autonomously executes detailed tasks, enhancing efficiency and reducing operator workload. This approach leverages real-time data processing and advanced algorithms to enable robots to adapt to dynamic environments with minimal direct intervention. Understanding supervisory control is essential for developing systems that balance human oversight with autonomous performance, improving precision and safety in complex robotic operations.
What is Direct Teleoperation?
Direct teleoperation involves a human operator controlling a robot in real-time using manual input devices such as joysticks or control panels, allowing immediate response to sensory feedback from the robot. This method ensures continuous human supervision, making it suitable for tasks requiring precise manipulation or rapid adjustments in dynamic environments. Unlike supervisory control, direct teleoperation depends on the operator's continuous presence and direct input rather than autonomous robot decision-making.
Key Differences Between Supervisory Control and Direct Teleoperation
Supervisory control involves an operator issuing high-level commands while the robot autonomously executes detailed tasks, enhancing efficiency and reducing operator workload. Direct teleoperation requires continuous real-time control by the operator, demanding constant attention and precise manual input for every robot movement. Key differences include the level of autonomy, operator workload, and the complexity of control interfaces, with supervisory control favoring strategic oversight and teleoperation relying on immediate manual control.
Human-Robot Interaction: Supervisory vs. Direct Approaches
Supervisory control in robotics enables operators to manage multiple robots by issuing high-level commands, optimizing efficiency and reducing cognitive load during complex tasks. Direct teleoperation involves continuous manual control, providing precise manipulation and immediate feedback, critical for delicate or unpredictable environments. Human-robot interaction in supervisory systems emphasizes autonomy and decision support, whereas direct teleoperation prioritizes real-time responsiveness and operator skill.
Advantages of Supervisory Control Systems
Supervisory control systems enhance robotic operations by enabling high-level task management, significantly reducing operator workload compared to direct teleoperation. These systems improve efficiency through autonomous decision-making and task execution, allowing operators to oversee multiple robots simultaneously. Enhanced safety and precision are achieved as supervisory control minimizes human error and latency during complex or hazardous tasks.
Benefits and Limitations of Direct Teleoperation
Direct teleoperation enables real-time, intuitive control of robotic systems by human operators, offering high precision and immediate responsiveness essential for complex tasks. Benefits include enhanced situational awareness and adaptability in unstructured environments, facilitating operations like remote surgery or hazardous material handling. Limitations involve operator fatigue, bandwidth constraints, and delays that can hinder performance in large-scale or long-distance applications.
Use Cases for Supervisory Control in Robotics
Supervisory control in robotics is ideal for managing multiple autonomous robots in industrial automation, such as warehouse logistics and manufacturing assembly lines, where high-level commands streamline complex tasks. It excels in remote robotic surgery, allowing surgeons to oversee procedures with precision while the robot performs intricate movements autonomously. Environments with limited communication bandwidth, like space exploration and underwater robotics, rely on supervisory control to enable efficient task execution despite delayed or intermittent connectivity.
Applications of Direct Teleoperation in Industry
Direct teleoperation enables real-time, hands-on control of robotic systems, making it ideal for hazardous or complex industrial environments such as nuclear decommissioning and underwater exploration. This approach enhances precision in tasks like remote welding, assembly, and material handling where human dexterity is essential but physical presence is unsafe. Industries such as manufacturing, oil and gas, and aerospace rely on direct teleoperation to increase operational safety while maintaining high accuracy and efficiency.
Challenges in Implementing Supervisory Control and Direct Teleoperation
Implementing supervisory control in robotics faces challenges such as maintaining reliable communication links, ensuring real-time decision-making accuracy, and handling complex environment modeling for autonomous task execution. Direct teleoperation struggles with latency issues, limited operator situational awareness, and the physical fatigue caused by continuous manual control over extended periods. Both approaches require advanced interfaces and robust system integration to optimize operator performance and robot responsiveness.
Future Trends: Integrating Supervisory Control and Teleoperation
Future trends in robotics emphasize integrating supervisory control with direct teleoperation to enhance system flexibility and operator efficiency. Hybrid models leverage autonomous decision-making while allowing real-time human intervention for complex tasks, optimizing performance across dynamic environments. Advances in AI, sensor fusion, and communication technologies drive this integration, enabling seamless transitions between automated and manual control modes in industrial and exploratory robotic applications.
Supervisory control vs Direct teleoperation Infographic