Kinesthetic teaching in robotics involves physically guiding a robot's limbs to demonstrate desired movements, enabling precise replication of complex tasks through direct human interaction. Imitation learning, on the other hand, relies on robots observing and replicating actions by analyzing sensor data or video inputs, allowing for more flexible adaptation to varied environments. Both methods optimize robot training but differ in the levels of human involvement and data requirements, with kinesthetic teaching often providing quicker skill acquisition and imitation learning offering broader generalization.
Table of Comparison
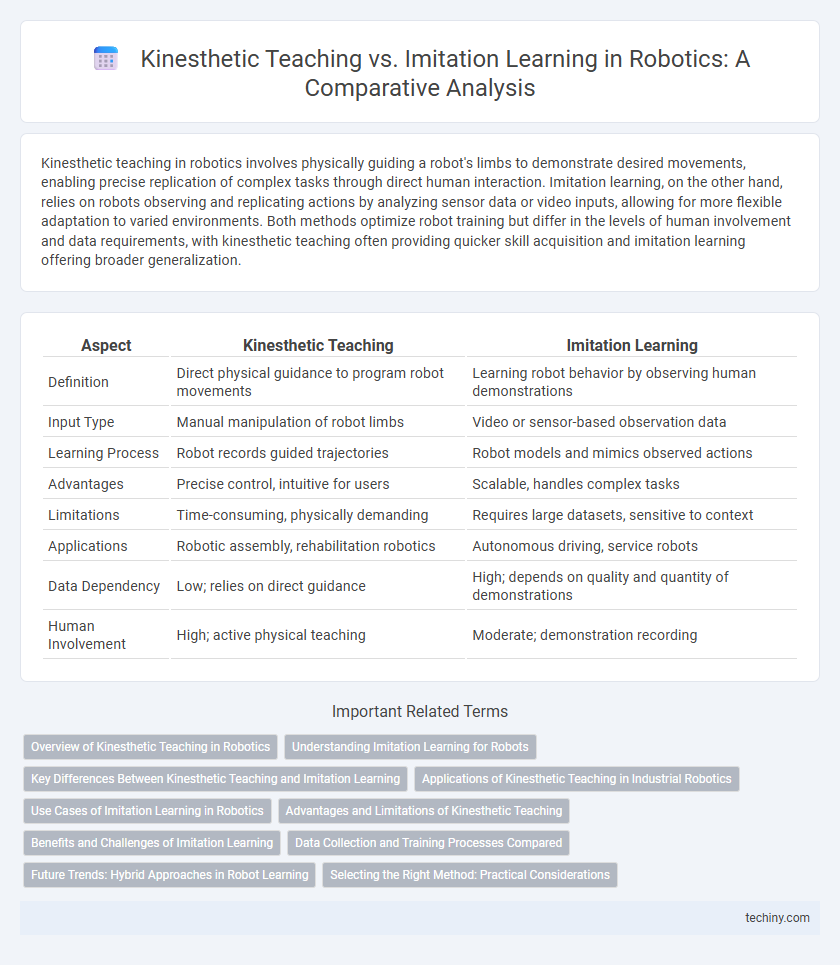
| Aspect | Kinesthetic Teaching | Imitation Learning |
|---|---|---|
| Definition | Direct physical guidance to program robot movements | Learning robot behavior by observing human demonstrations |
| Input Type | Manual manipulation of robot limbs | Video or sensor-based observation data |
| Learning Process | Robot records guided trajectories | Robot models and mimics observed actions |
| Advantages | Precise control, intuitive for users | Scalable, handles complex tasks |
| Limitations | Time-consuming, physically demanding | Requires large datasets, sensitive to context |
| Applications | Robotic assembly, rehabilitation robotics | Autonomous driving, service robots |
| Data Dependency | Low; relies on direct guidance | High; depends on quality and quantity of demonstrations |
| Human Involvement | High; active physical teaching | Moderate; demonstration recording |
Overview of Kinesthetic Teaching in Robotics
Kinesthetic teaching in robotics involves physically guiding a robot through desired motions to demonstrate tasks, enabling the robot to record and replicate these movements with precision. This method leverages direct human-robot interaction, enhancing the robot's ability to learn complex tasks through proprioceptive feedback and physical manipulation. Unlike imitation learning, which relies on visual observation, kinesthetic teaching provides richer sensory information, improving the efficiency and accuracy of robot skill acquisition.
Understanding Imitation Learning for Robots
Imitation learning enables robots to acquire complex tasks by observing and replicating human demonstrations, leveraging deep learning techniques to generalize actions across varying contexts. Unlike kinesthetic teaching, which relies on direct physical guidance, imitation learning allows for scalable data-driven skill acquisition without manual intervention. This approach enhances robotic adaptability and accelerates training in dynamic and unstructured environments.
Key Differences Between Kinesthetic Teaching and Imitation Learning
Kinesthetic teaching involves physically guiding a robot's limbs through desired movements, enabling direct encoding of trajectories and force feedback for precise motor control. Imitation learning relies on observational data, where robots learn tasks by analyzing demonstrations, requiring sophisticated perception and generalization mechanisms. Key differences include the mode of data acquisition--physical manipulation versus visual observation--and the complexity of data processing needed to replicate human actions.
Applications of Kinesthetic Teaching in Industrial Robotics
Kinesthetic teaching enables operators to physically guide industrial robots through precise task movements, streamlining programming for complex assembly and welding applications. This method enhances robot adaptability and efficiency in customization-heavy manufacturing environments by capturing human demonstrations into executable trajectories. Compared to imitation learning, kinesthetic teaching reduces training time and improves accuracy in scenarios requiring direct human-robot interaction and real-time adjustments.
Use Cases of Imitation Learning in Robotics
Imitation learning in robotics is widely used for tasks requiring dexterity and adaptability, such as assembly line automation, object manipulation, and human-robot collaboration. It enables robots to learn complex behaviors by observing demonstrations, reducing the need for explicit programming and allowing faster deployment in dynamic environments. This method excels in applications like robotic surgery, service robots, and autonomous vehicles where replicating expert human actions enhances performance and safety.
Advantages and Limitations of Kinesthetic Teaching
Kinesthetic teaching allows robots to learn tasks through direct physical guidance, enabling precise replication of human movements and intuitive programming without explicit coding. This method excels in complex manipulation tasks requiring fine motor skills but is limited by the need for human presence and difficulty scaling to diverse or unstructured environments. Unlike imitation learning, kinesthetic teaching offers higher accuracy in demonstrations but may lack generalization to variations outside the taught motions.
Benefits and Challenges of Imitation Learning
Imitation learning enables robots to acquire complex skills by observing human demonstrations, significantly reducing the need for explicit programming and accelerating the training process. This approach enhances adaptability and generalization across diverse tasks but faces challenges such as reliance on high-quality, noise-free demonstrations and difficulties in handling variations or unseen scenarios. Despite these obstacles, advancements in deep learning and sensor technology continue to improve imitation learning's robustness and efficiency in robotic applications.
Data Collection and Training Processes Compared
Kinesthetic teaching involves direct physical manipulation of a robot's limbs to collect precise motion data, enabling the robot to learn tasks through guided demonstrations. In imitation learning, data collection relies on observing expert behavior, often through sensors or video recordings, which requires extensive preprocessing to extract actionable features. Training in kinesthetic teaching typically demands less computational overhead due to explicit trajectory inputs, whereas imitation learning involves complex model training to generalize from varied demonstrations.
Future Trends: Hybrid Approaches in Robot Learning
Hybrid approaches in robot learning combine kinesthetic teaching and imitation learning to leverage the strengths of both methods, enhancing adaptability and efficiency in robotic systems. These techniques integrate direct human guidance with observational learning, enabling robots to generalize tasks in dynamic environments more effectively. Future trends highlight the development of algorithms that seamlessly fuse tactile feedback with demonstration data, advancing the precision and versatility of autonomous robots.
Selecting the Right Method: Practical Considerations
Kinesthetic teaching offers direct physical guidance, enabling robots to learn precise movements through human interaction, which is ideal for tasks requiring high accuracy in constrained environments. Imitation learning leverages observation and demonstration data, allowing robots to generalize actions in dynamic settings with less manual intervention. Selecting the right method depends on factors such as task complexity, environment variability, and the need for adaptation versus repeatability in industrial robotics applications.
kinesthetic teaching vs imitation learning Infographic