Supervisory control in robotics involves an operator managing a robot by issuing high-level commands while the system autonomously executes tasks, enhancing efficiency and reducing operator workload. Teleoperation requires direct, continuous control from the operator, providing precise manipulation, especially in complex or unpredictable environments. Both methods play crucial roles in robotics, with supervisory control favoring automation and teleoperation emphasizing human intervention for real-time responsiveness.
Table of Comparison
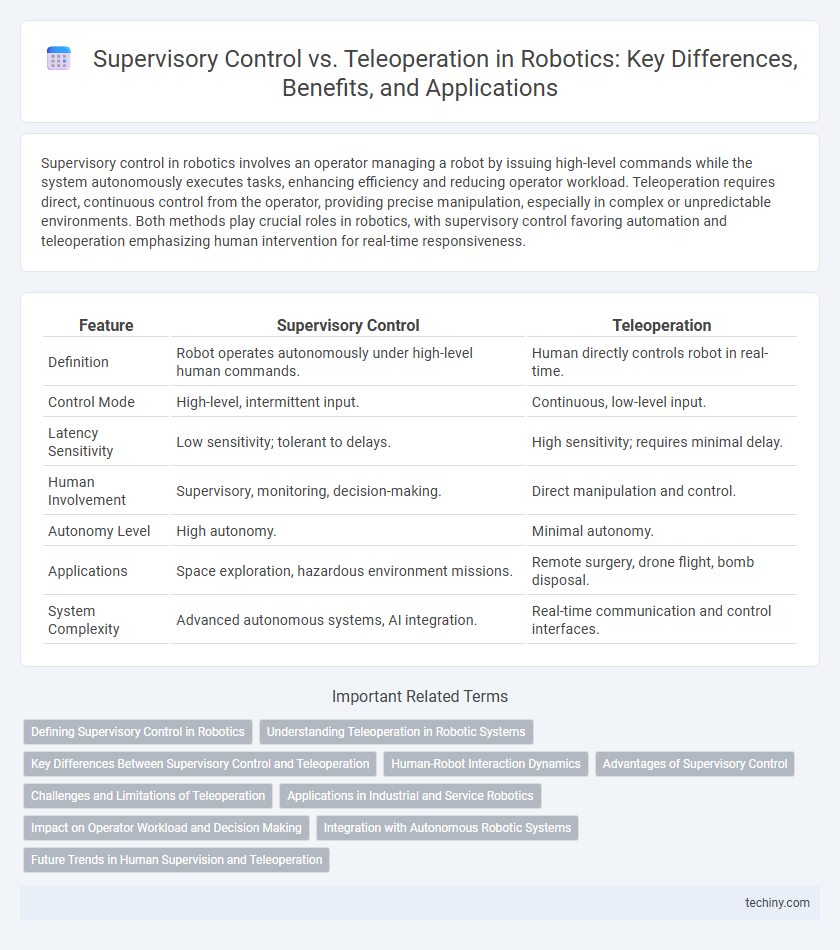
| Feature | Supervisory Control | Teleoperation |
|---|---|---|
| Definition | Robot operates autonomously under high-level human commands. | Human directly controls robot in real-time. |
| Control Mode | High-level, intermittent input. | Continuous, low-level input. |
| Latency Sensitivity | Low sensitivity; tolerant to delays. | High sensitivity; requires minimal delay. |
| Human Involvement | Supervisory, monitoring, decision-making. | Direct manipulation and control. |
| Autonomy Level | High autonomy. | Minimal autonomy. |
| Applications | Space exploration, hazardous environment missions. | Remote surgery, drone flight, bomb disposal. |
| System Complexity | Advanced autonomous systems, AI integration. | Real-time communication and control interfaces. |
Defining Supervisory Control in Robotics
Supervisory control in robotics involves a human operator overseeing and directing autonomous robot systems through high-level commands rather than continuous manual control. This approach enables robots to perform complex tasks independently while the supervisor monitors progress, intervening only when necessary to adjust parameters or correct errors. It contrasts with teleoperation, where the operator maintains real-time direct control over the robot's movements and actions.
Understanding Teleoperation in Robotic Systems
Teleoperation in robotic systems enables remote manipulation of robots by human operators through real-time control interfaces, often utilizing haptic feedback and video streams to enhance situational awareness. This approach contrasts with supervisory control, where operators provide high-level commands and the robot executes tasks autonomously, reducing direct human intervention. Understanding teleoperation is crucial for applications requiring precise manual control, such as hazardous environment exploration, surgical robotics, and complex assembly operations.
Key Differences Between Supervisory Control and Teleoperation
Supervisory control involves high-level command input where the operator sets goals and the robotic system autonomously executes tasks, optimizing efficiency and reducing operator workload. Teleoperation requires continuous manual control and real-time input from the operator, enhancing precision in complex or unpredictable environments. Key differences include the levels of autonomy, control latency, and operator engagement, with supervisory control offering greater independence and teleoperation demanding constant operator interaction.
Human-Robot Interaction Dynamics
Supervisory control enables operators to manage multiple robots simultaneously through high-level commands, optimizing task efficiency and reducing cognitive load during complex missions. Teleoperation involves direct, real-time control of a robot by a human operator, allowing precise manipulation in dynamic or hazardous environments but increasing operator workload and fatigue. The dynamics of human-robot interaction vary significantly between these modes, with supervisory control emphasizing autonomous robot behavior and teleoperation relying on continuous human input for responsive control.
Advantages of Supervisory Control
Supervisory control enables efficient management of multiple robots by allowing high-level commands and autonomous execution, reducing operator workload and increasing operational scalability. This control mode enhances safety by minimizing direct human intervention in hazardous environments through monitoring rather than continuous manual control. It also supports real-time decision-making using sensor feedback, enabling quicker adaptation to dynamic conditions compared to teleoperation.
Challenges and Limitations of Teleoperation
Teleoperation faces significant challenges including latency issues that degrade real-time control and haptic feedback, limiting operator precision and responsiveness. Environmental unpredictability and limited sensor data can cause difficulty in situational awareness, increasing the risk of operational errors. Moreover, reliance on communication links introduces vulnerabilities to signal loss and interference, which can compromise mission-critical tasks in robotic systems.
Applications in Industrial and Service Robotics
Supervisory control in industrial robotics enables operators to manage multiple robots remotely through high-level commands, optimizing efficiency in manufacturing and assembly lines. Teleoperation is essential in service robotics for real-time human control of robots in hazardous or dynamic environments, such as remote healthcare assistance or hazardous material handling. Both methods enhance flexibility and precision but differ in autonomy levels, with supervisory control favoring automated task execution and teleoperation relying on continuous human input.
Impact on Operator Workload and Decision Making
Supervisory control reduces operator workload by enabling high-level task management and automated execution, allowing operators to focus on strategic decision making rather than continuous manual control. Teleoperation demands constant attention and manual input, increasing cognitive load and the risk of errors during complex tasks. Enhanced autonomy in supervisory control optimizes decision-making efficiency by allowing operators to intervene only when necessary, improving overall system performance and safety.
Integration with Autonomous Robotic Systems
Supervisory control enables operators to manage multiple autonomous robots through high-level commands, enhancing efficiency in complex robotic systems. Teleoperation requires constant human input for direct manipulation, limiting scalability in dynamic environments. Integrating supervisory control with autonomous robotic systems improves task allocation, reduces operator workload, and enhances real-time system adaptability.
Future Trends in Human Supervision and Teleoperation
Future trends in human supervision and teleoperation emphasize increasing autonomy in robotic systems, enabling supervisors to manage multiple robots simultaneously with minimal intervention. Advanced AI-driven interfaces and predictive analytics will enhance situational awareness, allowing for more efficient decision-making and reduced cognitive load on human operators. Integration of augmented reality and haptic feedback technologies promises to improve teleoperation precision and user experience, supporting complex tasks in remote or hazardous environments.
Supervisory control vs Teleoperation Infographic