Cartesian control in robotics enables precise manipulation by directly specifying the end-effector's position and orientation in 3D space, simplifying path planning for tasks requiring spatial accuracy. Joint control manages each robot joint's angle independently, offering granular control over the robot's configuration but often requiring complex calculations to achieve desired end-effector motion. Optimizing robotic performance involves selecting Cartesian control for tasks emphasizing spatial trajectories and joint control for applications demanding intricate joint coordination.
Table of Comparison
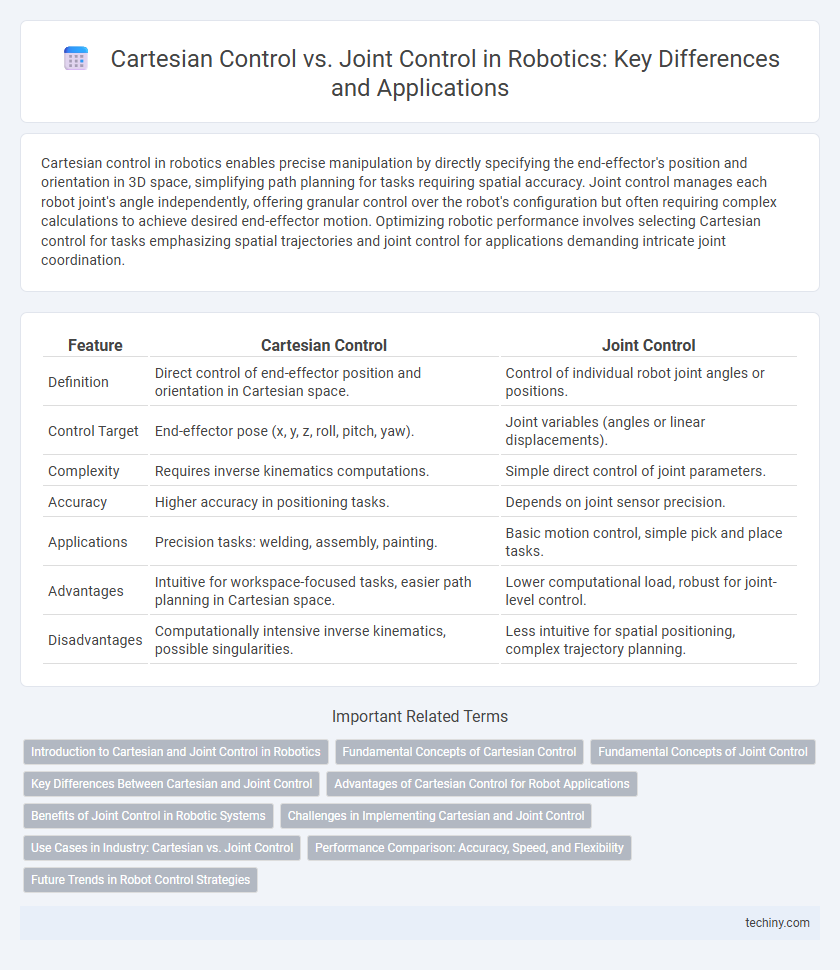
| Feature | Cartesian Control | Joint Control |
|---|---|---|
| Definition | Direct control of end-effector position and orientation in Cartesian space. | Control of individual robot joint angles or positions. |
| Control Target | End-effector pose (x, y, z, roll, pitch, yaw). | Joint variables (angles or linear displacements). |
| Complexity | Requires inverse kinematics computations. | Simple direct control of joint parameters. |
| Accuracy | Higher accuracy in positioning tasks. | Depends on joint sensor precision. |
| Applications | Precision tasks: welding, assembly, painting. | Basic motion control, simple pick and place tasks. |
| Advantages | Intuitive for workspace-focused tasks, easier path planning in Cartesian space. | Lower computational load, robust for joint-level control. |
| Disadvantages | Computationally intensive inverse kinematics, possible singularities. | Less intuitive for spatial positioning, complex trajectory planning. |
Introduction to Cartesian and Joint Control in Robotics
Cartesian control in robotics focuses on managing the robot's end-effector position and orientation in three-dimensional space using X, Y, and Z coordinates, enabling precise spatial manipulation. Joint control involves regulating each robotic joint's angle or displacement to achieve the desired pose or trajectory, emphasizing the robot's kinematic configuration. Understanding the differences between Cartesian and joint control is essential for optimizing robot motion planning and execution in applications such as assembly, welding, and pick-and-place tasks.
Fundamental Concepts of Cartesian Control
Cartesian control in robotics focuses on guiding the robot's end-effector along precise paths within a three-dimensional Cartesian coordinate system, allowing for direct manipulation of position and orientation. It contrasts with joint control, which manages each robotic joint's angles or velocities individually, making Cartesian control more intuitive for tasks requiring spatial precision like welding or assembly. Key concepts include kinematic transformation, inverse kinematics, and trajectory planning to ensure smooth and accurate motion in Cartesian space.
Fundamental Concepts of Joint Control
Joint control in robotics focuses on regulating each actuator or motor within a robot's joints to achieve precise movements and positions. This control method directly manipulates joint angles, velocities, and torques, enabling accurate execution of complex tasks by controlling the robot's degrees of freedom individually. Joint control systems often use feedback loops with sensors to maintain stability and responsiveness during operation.
Key Differences Between Cartesian and Joint Control
Cartesian control commands a robot to move its end-effector along precise paths defined by x, y, and z coordinates, optimizing task accuracy and spatial orientation. Joint control regulates each joint's angle, allowing complex configurations but requiring intricate transformations to achieve desired end-effector positions. Cartesian control excels in straightforward path planning and spatial tasks, while joint control provides greater flexibility for intricate maneuvers and obstacle avoidance.
Advantages of Cartesian Control for Robot Applications
Cartesian control offers precise end-effector positioning in robot applications, enhancing accuracy during tasks such as assembly, welding, and pick-and-place operations. This control method simplifies trajectory planning by directly manipulating the robot's position in three-dimensional space, reducing computational complexity compared to joint control. Improved intuitiveness for programmers and operators enables faster deployment and easier integration with vision systems and external sensors.
Benefits of Joint Control in Robotic Systems
Joint Control in robotic systems enables precise manipulation of each individual actuator, resulting in enhanced accuracy and smoother motion trajectories. This method improves adaptability in complex tasks by directly managing torque and velocity at each joint, which optimizes energy efficiency and reduces wear on mechanical components. Implementing Joint Control simplifies inverse kinematics calculations, leading to faster response times and better overall system stability.
Challenges in Implementing Cartesian and Joint Control
Implementing Cartesian control in robotics often faces challenges due to the complexity of accurately mapping end-effector positions in three-dimensional space while managing real-time environmental feedback. Joint control poses difficulties in coordinating multiple joint actuators to achieve smooth, precise movements without inducing mechanical stress or cumulative errors in kinematics. Both control methods require advanced algorithms and sensor integration to overcome issues related to nonlinearity, latency, and robustness in dynamic tasks.
Use Cases in Industry: Cartesian vs. Joint Control
Cartesian control excels in applications requiring precise end-effector positioning such as pick-and-place, welding, and assembly tasks in automotive and electronics industries. Joint control is preferred in complex manufacturing processes where individual joint movements and trajectories optimize robot agility, including painting, grinding, and intricate part manipulation. Industries integrate both methods to achieve a balance between path accuracy and flexible motion capabilities, enhancing overall production efficiency.
Performance Comparison: Accuracy, Speed, and Flexibility
Cartesian control offers superior accuracy in positioning by directly managing the end-effector's coordinates, making it ideal for tasks demanding precise spatial manipulation. Joint control provides faster response times due to direct actuation of individual joints, enhancing speed but sometimes sacrificing precision in complex trajectories. Flexibility is higher in Cartesian control as it simplifies programming for diverse tasks, whereas joint control excels in scenarios requiring intricate joint movements and adaptability to dynamic environments.
Future Trends in Robot Control Strategies
Future trends in robot control strategies emphasize the integration of Cartesian control and joint control to enhance precision and adaptability in complex tasks. Advances in sensor fusion, machine learning, and real-time data processing enable robots to dynamically switch between Cartesian space commands and joint space commands for optimal performance. This hybrid approach is driving innovations in autonomous systems, collaborative robots, and industrial automation by improving trajectory planning, obstacle avoidance, and human-robot interaction.
Cartesian Control vs Joint Control Infographic