Force control in robotics manages the interaction forces between the robot and its environment, enabling delicate tasks like assembly and surface finishing. Position control focuses on accurately guiding the robot's joints or end-effector along predefined paths, essential for precise movements and repeatability. Balancing force control and position control optimizes performance in applications requiring both precise motion and adaptive force response.
Table of Comparison
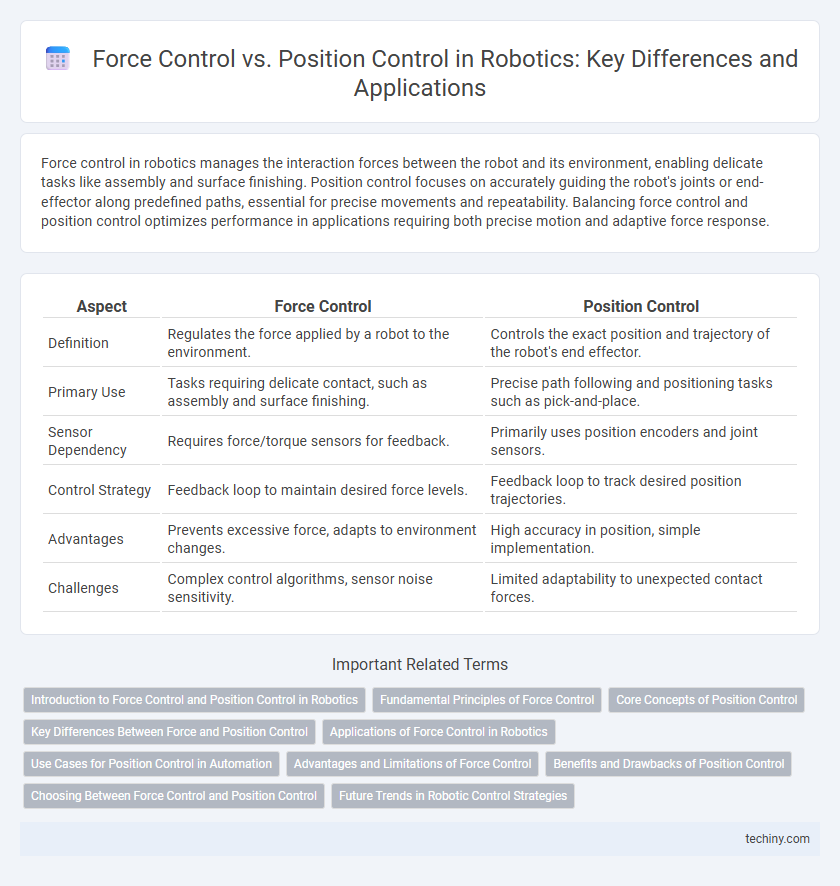
| Aspect | Force Control | Position Control |
|---|---|---|
| Definition | Regulates the force applied by a robot to the environment. | Controls the exact position and trajectory of the robot's end effector. |
| Primary Use | Tasks requiring delicate contact, such as assembly and surface finishing. | Precise path following and positioning tasks such as pick-and-place. |
| Sensor Dependency | Requires force/torque sensors for feedback. | Primarily uses position encoders and joint sensors. |
| Control Strategy | Feedback loop to maintain desired force levels. | Feedback loop to track desired position trajectories. |
| Advantages | Prevents excessive force, adapts to environment changes. | High accuracy in position, simple implementation. |
| Challenges | Complex control algorithms, sensor noise sensitivity. | Limited adaptability to unexpected contact forces. |
Introduction to Force Control and Position Control in Robotics
Force control in robotics enables manipulators to adapt interaction forces with environments, essential for tasks requiring delicate touches or handling variable compliance. Position control focuses on precise trajectory and spatial accuracy of robotic arms, crucial for repeatable and exact movements in structured settings. Combining force and position control enhances robot versatility in dynamic, unstructured environments by balancing accuracy and adaptability in task execution.
Fundamental Principles of Force Control
Force control in robotics focuses on regulating interaction forces between the robot and its environment by continuously adjusting actuator outputs based on sensor feedback, enabling compliant and adaptive manipulation. Unlike position control, which strictly follows predefined trajectories, force control integrates force/torque sensor data to modulate movements, ensuring safe contact and precise force application. Fundamental principles involve impedance and admittance control strategies, utilizing feedback loops to dynamically balance stiffness, damping, and inertia for effective force regulation during task execution.
Core Concepts of Position Control
Position control in robotics involves regulating a robot's end effector or joint positions to achieve precise movement and task execution. It relies on accurate sensors and feedback loops to compare the desired position with the actual position, minimizing errors through control algorithms such as PID (Proportional-Integral-Derivative). This core concept ensures accurate trajectory tracking, essential for applications requiring high precision and repeatability.
Key Differences Between Force and Position Control
Force control in robotics manages the interaction forces between the robot and its environment, ensuring precise force application during tasks like assembly or surface finishing. Position control, on the other hand, drives the robot to follow predefined trajectories with high accuracy, focusing on spatial positioning without directly managing contact forces. Key differences include force control's emphasis on compliant, adaptive behavior under external load and position control's focus on exact path tracking, making force control suitable for delicate manipulation and position control ideal for precise, repeatable motions.
Applications of Force Control in Robotics
Force control in robotics enables precise manipulation in tasks requiring delicate interaction with environments, such as assembly operations, surface finishing, and medical procedures. Unlike position control, force control adjusts the robot's grip and contact force in real-time, improving safety and accuracy when handling fragile objects or navigating uncertain surfaces. Applications include automated deburring, surgical robots applying controlled pressure, and collaborative robots working alongside humans with sensitive force feedback.
Use Cases for Position Control in Automation
Position control in robotics is crucial for tasks requiring precise and repeatable movements, such as assembly line automation, pick-and-place operations, and CNC machining. It enables robots to accurately follow pre-defined paths, ensuring consistent product quality and minimizing errors. Industrial applications benefit from position control's ability to maintain exact tool positioning, enhancing efficiency in manufacturing processes.
Advantages and Limitations of Force Control
Force control in robotics enables precise interaction with varying environments by regulating the contact force between the robot and objects, enhancing tasks such as assembly, polishing, and delicate manipulation. Its main advantage lies in adaptability to uncertain or dynamic conditions, allowing robots to maintain desired force levels despite environmental changes, while position control lacks this flexibility. Limitations include increased system complexity, the need for accurate force sensing and feedback, and potential instability in control loops if not properly tuned.
Benefits and Drawbacks of Position Control
Position control in robotics offers precise movement and accurate trajectory tracking, making it ideal for applications requiring exact path following and repeatability. However, position control can struggle with external disturbances and varying loads, as it does not inherently compensate for force interactions, potentially causing instability or damage when unexpected contact occurs. The lack of adaptability in force response limits its use in unstructured or dynamic environments compared to force control strategies.
Choosing Between Force Control and Position Control
Choosing between force control and position control in robotics depends primarily on the application's requirements for interaction and precision. Force control excels in tasks involving physical contact, such as assembly or surface finishing, by regulating the force applied to the environment without strict adherence to exact positions. Position control is preferred for precise path following and repeatability in tasks like pick-and-place operations where accurate spatial positioning is critical.
Future Trends in Robotic Control Strategies
Future trends in robotic control strategies emphasize adaptive force control integrated with machine learning algorithms to enhance precision and flexibility in unstructured environments. Hybrid control systems combining force and position feedback are being developed to optimize interaction with dynamic and complex tasks, improving safety and efficiency. Emerging approaches leverage real-time sensor fusion and predictive modeling for autonomous adjustment of control parameters, enabling robots to perform delicate manipulations and human-robot collaboration more effectively.
Force control vs position control Infographic