ROS 2 offers enhanced real-time capabilities, improved security features, and native support for multi-robot systems, addressing many limitations of ROS 1. The updated communication middleware in ROS 2 ensures better scalability and reliability for complex robotic applications. Transitioning from ROS 1 to ROS 2 enables developers to leverage modern middleware standards and future-proof their robotic software architecture.
Table of Comparison
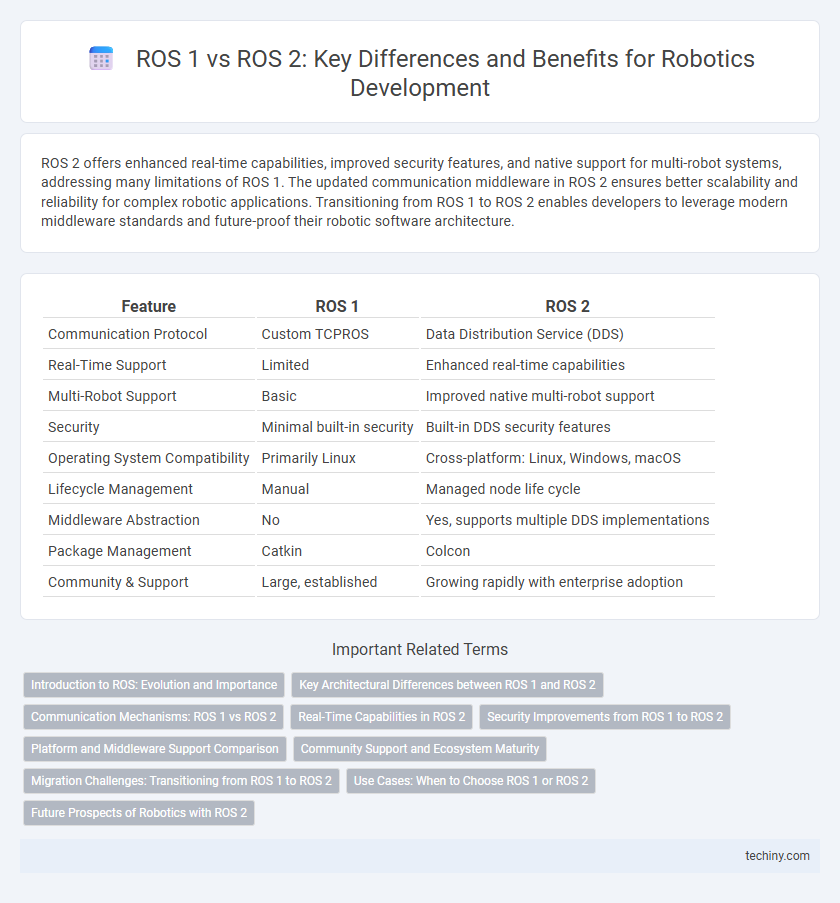
| Feature | ROS 1 | ROS 2 |
|---|---|---|
| Communication Protocol | Custom TCPROS | Data Distribution Service (DDS) |
| Real-Time Support | Limited | Enhanced real-time capabilities |
| Multi-Robot Support | Basic | Improved native multi-robot support |
| Security | Minimal built-in security | Built-in DDS security features |
| Operating System Compatibility | Primarily Linux | Cross-platform: Linux, Windows, macOS |
| Lifecycle Management | Manual | Managed node life cycle |
| Middleware Abstraction | No | Yes, supports multiple DDS implementations |
| Package Management | Catkin | Colcon |
| Community & Support | Large, established | Growing rapidly with enterprise adoption |
Introduction to ROS: Evolution and Importance
ROS 1, launched in 2010, laid the foundation for robotic software frameworks by enabling modularity and hardware abstraction across diverse robotic platforms. ROS 2 builds on this legacy with enhancements in real-time communication, improved security features, and greater support for multi-robot systems, addressing the limitations of ROS 1. The evolution from ROS 1 to ROS 2 marks a significant advancement in robotics middleware, facilitating more robust, scalable, and flexible robotic applications.
Key Architectural Differences between ROS 1 and ROS 2
ROS 2 introduces a modular architecture with a focus on real-time capabilities, using the DDS (Data Distribution Service) middleware for improved communication and scalability, unlike ROS 1 which relies on a custom TCP/IP-based message-passing system. Unlike ROS 1's centralized ROS Master, ROS 2 employs a decentralized discovery mechanism, enhancing fault tolerance and enabling multiple nodes to operate without a single point of failure. Security enhancements in ROS 2 include built-in support for DDS-Security, enabling authentication, encryption, and access control not natively available in ROS 1.
Communication Mechanisms: ROS 1 vs ROS 2
ROS 1 relies on a centralized communication master for message passing, which can create single points of failure and scalability challenges in complex robotic systems. In contrast, ROS 2 adopts a decentralized, data-centric middleware based on DDS (Data Distribution Service), enabling real-time, reliable, and secure communication across distributed nodes. This shift enhances ROS 2's robustness, flexibility in multi-robot setups, and supports advanced quality-of-service configurations critical for industrial and safety-critical robotic applications.
Real-Time Capabilities in ROS 2
ROS 2 enhances real-time capabilities through improved middleware architecture, utilizing DDS (Data Distribution Service) to provide deterministic communication, essential for time-critical robotic applications. Its support for real-time operating systems (RTOS) like RTLinux and Nucleus enables precise task scheduling and low-latency message passing. These advancements in ROS 2 address the limitations of ROS 1, making it more suitable for complex, safety-critical robotics systems requiring reliable real-time performance.
Security Improvements from ROS 1 to ROS 2
ROS 2 introduces significant security improvements over ROS 1, including built-in support for DDS Security, which provides authentication, encryption, and access control on communication channels. Unlike ROS 1, which lacks native security features and relies on external tools for protection, ROS 2 enforces secure node-to-node communication, enhancing system resilience against cyber threats. These advancements align ROS 2 with modern industrial and research requirements for secure robotics deployments.
Platform and Middleware Support Comparison
ROS 1 primarily supports Linux-based platforms with limited real-time capabilities and relies on its custom middleware, ROS Master and ROS Topics, which can restrict scalability and interoperability. ROS 2 extends robust support across multiple platforms including Linux, Windows, and macOS, leveraging DDS (Data Distribution Service) middleware for improved real-time communication, security, and cross-platform compatibility. The adoption of DDS in ROS 2 enhances modularity and flexibility, making it suitable for complex, distributed robotics systems requiring high performance and reliability.
Community Support and Ecosystem Maturity
ROS 1 boasts a well-established community with extensive libraries, tools, and third-party packages accumulated over a decade, ensuring robust support and extensive documentation. ROS 2, while newer, rapidly gains traction with growing contributions and corporate backing, addressing modern robotics needs like real-time communication and multi-robot systems. The evolving ROS 2 ecosystem promises enhanced scalability and security but currently offers less legacy package compatibility compared to ROS 1's mature, proven framework.
Migration Challenges: Transitioning from ROS 1 to ROS 2
Migrating from ROS 1 to ROS 2 presents significant challenges due to architectural differences such as the shift from a custom communication layer to DDS-based middleware, requiring substantial reconfiguration of message passing and node interactions. The lack of backward compatibility demands rewriting key components, adapting to new APIs, and addressing changes in package management and build systems. Developers face increased complexity in testing and validation processes to ensure system reliability and real-time performance in ROS 2 environments.
Use Cases: When to Choose ROS 1 or ROS 2
ROS 1 is suitable for well-established projects requiring stable middleware with extensive community support, especially in educational environments and legacy robotics systems. ROS 2 offers advanced use cases demanding real-time performance, improved security, and support for multi-robot systems in industrial automation and autonomous vehicles. Selecting between ROS 1 and ROS 2 depends on system requirements like communication protocols, platform compatibility, and the need for scalability in complex robotic applications.
Future Prospects of Robotics with ROS 2
ROS 2 offers enhanced real-time capabilities, improved security features, and better support for multi-robot systems, positioning it as the foundation for future robotics development. Its modular architecture and middleware abstraction enable seamless integration with emerging technologies such as AI-driven perception and autonomous navigation. As industries increasingly adopt ROS 2, its ecosystem is rapidly expanding, fostering innovation and accelerating the deployment of advanced robotic applications across diverse sectors.
ROS 1 vs ROS 2 Infographic