Power autonomy in robotics refers to a robot's ability to operate independently without frequent recharging or battery replacement, ensuring prolonged activity in diverse environments. Communication autonomy emphasizes the capacity of robots to maintain seamless and reliable data exchange with control systems or peer units, even in challenging or dynamic conditions. Balancing power autonomy with communication autonomy is crucial for optimizing robotic efficiency and effectiveness in mission-critical applications.
Table of Comparison
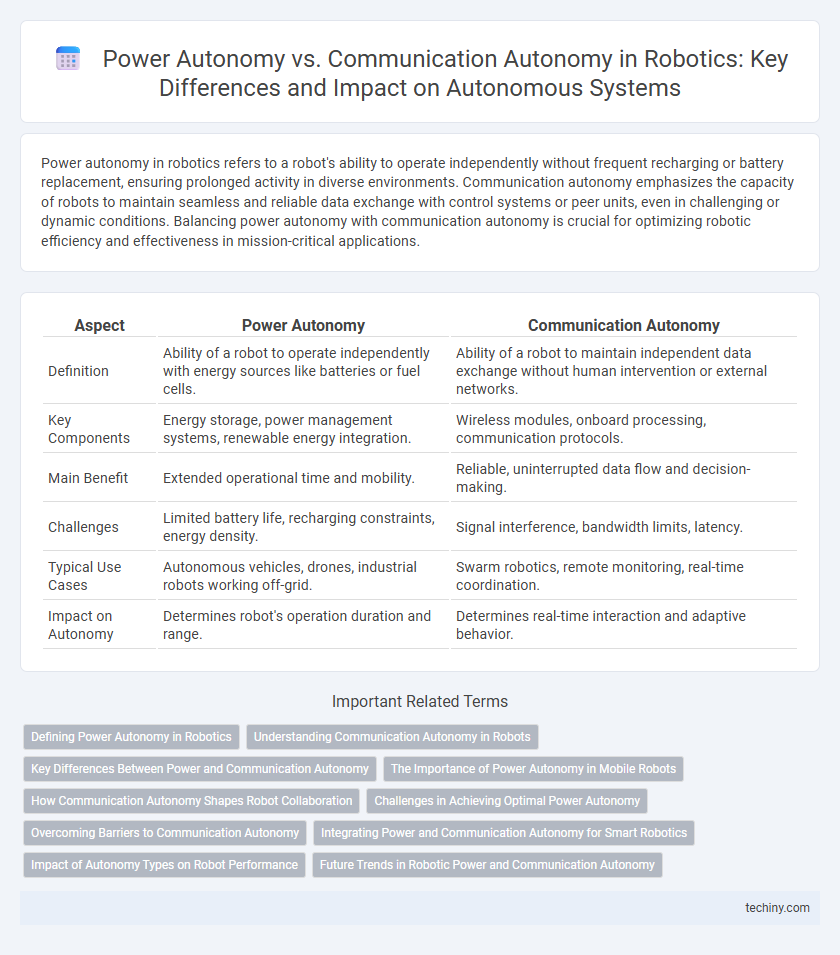
| Aspect | Power Autonomy | Communication Autonomy |
|---|---|---|
| Definition | Ability of a robot to operate independently with energy sources like batteries or fuel cells. | Ability of a robot to maintain independent data exchange without human intervention or external networks. |
| Key Components | Energy storage, power management systems, renewable energy integration. | Wireless modules, onboard processing, communication protocols. |
| Main Benefit | Extended operational time and mobility. | Reliable, uninterrupted data flow and decision-making. |
| Challenges | Limited battery life, recharging constraints, energy density. | Signal interference, bandwidth limits, latency. |
| Typical Use Cases | Autonomous vehicles, drones, industrial robots working off-grid. | Swarm robotics, remote monitoring, real-time coordination. |
| Impact on Autonomy | Determines robot's operation duration and range. | Determines real-time interaction and adaptive behavior. |
Defining Power Autonomy in Robotics
Power autonomy in robotics refers to a robot's ability to operate independently without relying on external power sources, achieved through advanced energy storage systems such as high-capacity batteries or energy harvesting technologies. This capability directly impacts the robot's operational duration and effectiveness in remote or inaccessible environments. Enhancing power autonomy is critical for applications requiring sustained, uninterrupted functionality, particularly in autonomous exploration and long-term monitoring tasks.
Understanding Communication Autonomy in Robots
Communication autonomy in robots enables independent decision-making through advanced data exchange protocols and real-time signal processing. This autonomy relies on robust wireless networks, adaptive communication algorithms, and decentralized control systems to maintain operational efficiency without direct human intervention. Enhancing communication autonomy supports collaborative multi-robot systems and dynamic environments by facilitating seamless information sharing and synchronization.
Key Differences Between Power and Communication Autonomy
Power autonomy in robotics refers to a robot's ability to operate independently without external energy sources, emphasizing battery life, energy efficiency, and power management systems. Communication autonomy focuses on a robot's capacity to transmit and receive data without relying on constant external networks, highlighting wireless communication protocols, signal integrity, and latency reduction. Key differences lie in energy sustainability for power autonomy versus reliable data exchange for communication autonomy, both critical for effective robotic operations.
The Importance of Power Autonomy in Mobile Robots
Power autonomy in mobile robots is critical for prolonged operation in dynamic environments, enabling sustained functionality without frequent recharging or power source replacement. High-capacity energy storage systems and efficient power management algorithms enhance robot endurance, directly impacting task efficiency and mission success. Communication autonomy, while essential for data exchange, relies on consistent power availability, making power autonomy the foundational element for reliable mobile robotic performance.
How Communication Autonomy Shapes Robot Collaboration
Communication autonomy enables robots to dynamically share real-time sensory data and task information, enhancing cooperative decision-making and reducing latency in multi-robot systems. By maintaining independent communication protocols and adaptive networking capabilities, robots achieve resilient collaboration even in unpredictable or bandwidth-limited environments. This autonomy in communication fosters scalable, decentralized robotic swarms that perform complex tasks with higher efficiency and robustness compared to reliance solely on power autonomy.
Challenges in Achieving Optimal Power Autonomy
Achieving optimal power autonomy in robotics involves addressing significant challenges such as limited energy storage capacity and the high power consumption of sensors and actuators. Efficient power management strategies, including energy harvesting and low-power electronics, are critical to extending operational time without frequent recharging or battery replacement. Balancing power autonomy with communication demands remains complex due to the energy-intensive nature of wireless data transmission protocols in robotic systems.
Overcoming Barriers to Communication Autonomy
Overcoming barriers to communication autonomy in robotics involves enhancing signal processing algorithms and deploying mesh networking technologies to ensure reliable data exchange even in complex environments. Advanced interference mitigation techniques and adaptive bandwidth management play critical roles in maintaining seamless communication among autonomous systems. Integrating edge computing helps reduce latency and dependency on centralized networks, significantly boosting communication autonomy alongside power autonomy.
Integrating Power and Communication Autonomy for Smart Robotics
Integrating power autonomy and communication autonomy in smart robotics enhances operational efficiency by enabling robots to manage their energy resources while maintaining continuous data exchange. Advanced energy harvesting technologies combined with adaptive communication protocols allow robots to perform extended missions in remote or dynamic environments. Optimizing this integration supports self-sufficient robotic systems capable of real-time decision-making and sustained connectivity.
Impact of Autonomy Types on Robot Performance
Power autonomy directly influences a robot's operational duration and energy efficiency, enabling sustained performance in remote or energy-constrained environments. Communication autonomy affects a robot's ability to independently process data and make decisions without relying on constant external input, enhancing responsiveness and reducing latency. The balance between power and communication autonomy determines overall robot effectiveness, with power autonomy ensuring longevity and communication autonomy improving adaptability and real-time decision-making.
Future Trends in Robotic Power and Communication Autonomy
Future trends in robotic power autonomy emphasize advancements in energy-efficient batteries, wireless power transfer, and energy harvesting techniques to prolong operational time without human intervention. Communication autonomy is evolving with the integration of 5G and edge computing, enabling real-time data processing and seamless machine-to-machine interactions in complex environments. These developments collectively enhance robots' ability to perform extended missions in remote or dynamic settings without dependency on external power sources or centralized control systems.
Power Autonomy vs Communication Autonomy Infographic