Model-based control in robotics relies on mathematical models of the system dynamics to predict and regulate robot behavior, ensuring precise and predictable performance. Data-driven control leverages machine learning algorithms to adaptively optimize robot actions based on sensor data, enhancing flexibility in complex or uncertain environments. Combining both approaches can improve robustness and efficiency, balancing theoretical precision with adaptability.
Table of Comparison
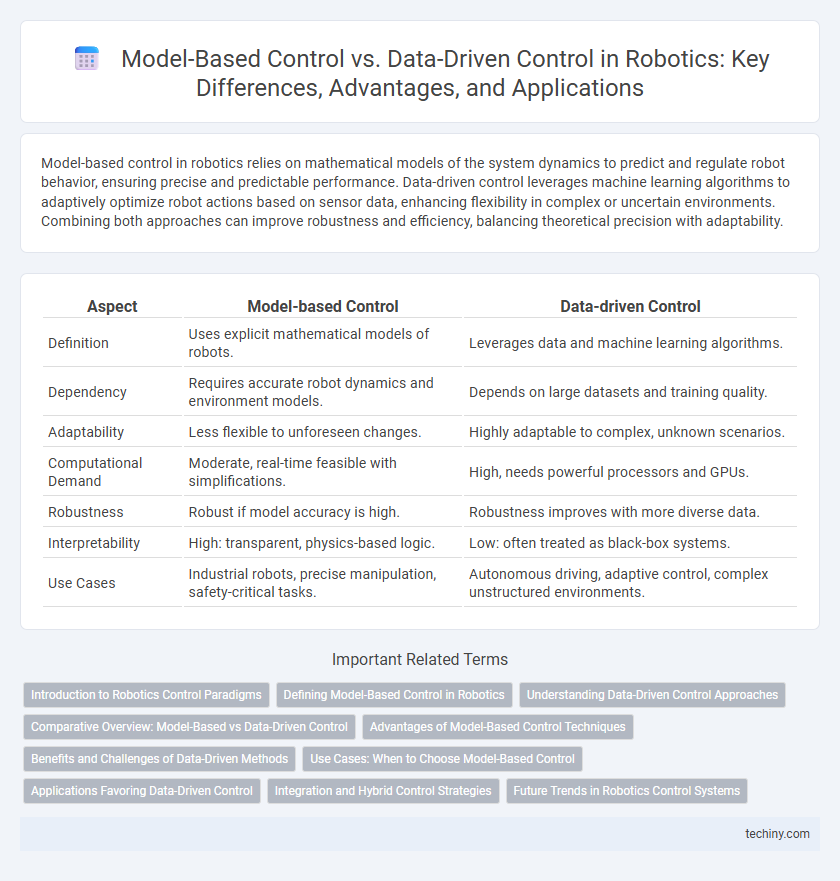
| Aspect | Model-based Control | Data-driven Control |
|---|---|---|
| Definition | Uses explicit mathematical models of robots. | Leverages data and machine learning algorithms. |
| Dependency | Requires accurate robot dynamics and environment models. | Depends on large datasets and training quality. |
| Adaptability | Less flexible to unforeseen changes. | Highly adaptable to complex, unknown scenarios. |
| Computational Demand | Moderate, real-time feasible with simplifications. | High, needs powerful processors and GPUs. |
| Robustness | Robust if model accuracy is high. | Robustness improves with more diverse data. |
| Interpretability | High: transparent, physics-based logic. | Low: often treated as black-box systems. |
| Use Cases | Industrial robots, precise manipulation, safety-critical tasks. | Autonomous driving, adaptive control, complex unstructured environments. |
Introduction to Robotics Control Paradigms
Model-based control in robotics relies on mathematical representations of robot dynamics to predict and govern system behavior, enabling precise manipulation and stability under varying conditions. Data-driven control utilizes machine learning algorithms and sensor data to adaptively optimize robot performance without explicit system models, excelling in complex or uncertain environments. Combining both paradigms enhances robustness and flexibility, leveraging model accuracy alongside data adaptability for advanced robotic control.
Defining Model-Based Control in Robotics
Model-based control in robotics relies on a mathematical representation of the robot's dynamics and environment to predict and regulate its behavior. This approach uses system models such as differential equations and kinematic constraints to design controllers that achieve precise motion and stability. Accurate modeling enables the implementation of techniques like Model Predictive Control (MPC) and optimal control for effective robot performance.
Understanding Data-Driven Control Approaches
Data-driven control approaches leverage machine learning algorithms and large datasets to model robotic system dynamics without explicit physical equations, enabling adaptation to complex, nonlinear behaviors. These methods improve performance in uncertain and changing environments by continuously updating control policies based on real-time sensor feedback and historical data. Unlike model-based control, data-driven techniques reduce reliance on precise system identification, offering flexibility for robots operating in unstructured settings.
Comparative Overview: Model-Based vs Data-Driven Control
Model-based control in robotics relies on precise mathematical models of robot dynamics, enabling predictable and stable performance with well-understood physical parameters, while data-driven control leverages machine learning algorithms to adapt and optimize behavior from sensor data, enhancing flexibility in unstructured environments. Model-based approaches excel in scenarios requiring high reliability and interpretability, whereas data-driven methods offer improved handling of complex, nonlinear systems without explicit models. Balancing these approaches often involves hybrid strategies that combine model fidelity with data-driven adaptability to achieve robust, efficient robotic control.
Advantages of Model-Based Control Techniques
Model-based control techniques in robotics leverage precise mathematical models of a robot's dynamics, enabling accurate prediction and adjustment of system behavior under various conditions. This approach offers enhanced stability, robustness, and interpretability compared to data-driven methods, which rely heavily on large datasets and may struggle with unseen scenarios. Model-based control excels in safety-critical applications by facilitating formal verification and real-time adaptability, ensuring reliable performance in complex robotic tasks.
Benefits and Challenges of Data-Driven Methods
Data-driven control methods leverage large datasets and machine learning algorithms to adapt robotic systems dynamically and improve performance in unstructured environments. These techniques offer benefits such as enhanced flexibility, ability to model complex nonlinear dynamics, and reduced reliance on precise mathematical models. Challenges include the need for extensive high-quality data, risk of overfitting, difficulty in ensuring stability and safety guarantees, and increased computational requirements during training and real-time operation.
Use Cases: When to Choose Model-Based Control
Model-based control excels in robotics applications requiring precise trajectory tracking and stability guarantees, such as industrial automation and surgical robots, where accurate system models ensure reliable performance. This approach is ideal when system dynamics are well-understood and safety constraints are critical, including aerospace drones and robotic manipulators in hazardous environments. Choosing model-based control reduces dependency on large datasets and enhances predictability in controlled, high-accuracy tasks.
Applications Favoring Data-Driven Control
Data-driven control excels in robotics applications with complex, nonlinear dynamics or environments lacking accurate models, such as autonomous vehicles and robotic manipulation in unstructured settings. It enables adaptive learning from sensory data, improving performance in scenarios where traditional model-based control struggles due to model inaccuracies or uncertainties. Real-world examples include reinforcement learning for robot locomotion and deep learning-based perception-control loops in robotic grasping tasks.
Integration and Hybrid Control Strategies
Model-based control leverages precise mathematical models of robotic systems, enabling accurate prediction and control of complex dynamics, while data-driven control utilizes machine learning algorithms to adapt to uncertainties and unmodeled dynamics from sensor data. Integration of these approaches in hybrid control strategies combines the robustness and interpretability of model-based methods with the adaptability and real-time learning capabilities of data-driven techniques. This hybrid framework enhances robotic performance by optimizing control accuracy, improving fault tolerance, and enabling dynamic adjustment in unstructured or changing environments.
Future Trends in Robotics Control Systems
Future trends in robotics control systems emphasize hybrid approaches combining model-based control's precision with data-driven control's adaptability to enhance performance in complex, dynamic environments. Integration of machine learning algorithms with classical control models enables real-time system identification and predictive maintenance, improving robustness and efficiency. Advances in computational power and sensor technologies further facilitate the development of autonomous robots capable of self-optimization and context-aware decision-making.
Model-based control vs Data-driven control Infographic