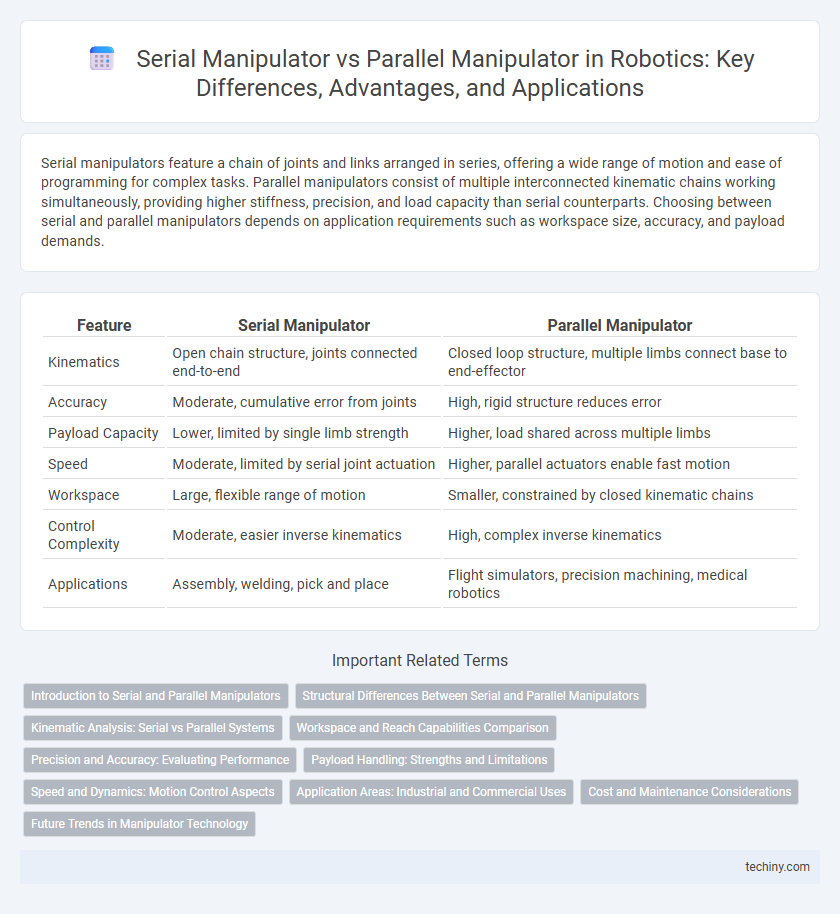
Serial manipulators feature a chain of joints and links arranged in series, offering a wide range of motion and ease of programming for complex tasks. Parallel manipulators consist of multiple interconnected kinematic chains working simultaneously, providing higher stiffness, precision, and load capacity than serial counterparts. Choosing between serial and parallel manipulators depends on application requirements such as workspace size, accuracy, and payload demands.
Table of Comparison
| Feature | Serial Manipulator | Parallel Manipulator |
|---|---|---|
| Kinematics | Open chain structure, joints connected end-to-end | Closed loop structure, multiple limbs connect base to end-effector |
| Accuracy | Moderate, cumulative error from joints | High, rigid structure reduces error |
| Payload Capacity | Lower, limited by single limb strength | Higher, load shared across multiple limbs |
| Speed | Moderate, limited by serial joint actuation | Higher, parallel actuators enable fast motion |
| Workspace | Large, flexible range of motion | Smaller, constrained by closed kinematic chains |
| Control Complexity | Moderate, easier inverse kinematics | High, complex inverse kinematics |
| Applications | Assembly, welding, pick and place | Flight simulators, precision machining, medical robotics |
Introduction to Serial and Parallel Manipulators
Serial manipulators consist of a sequence of joints and links connected end-to-end, offering a wide range of motion and flexibility ideal for complex tasks requiring high dexterity. Parallel manipulators feature multiple kinematic chains working simultaneously between the base and end-effector, providing enhanced rigidity, higher load capacity, and improved precision. The choice between serial and parallel manipulators depends on application requirements such as workspace size, payload, accuracy, and speed in robotic systems.
Structural Differences Between Serial and Parallel Manipulators
Serial manipulators consist of a series of linked joints and actuators arranged in a chain, allowing a wide range of motion but often resulting in cumulative positioning errors and lower stiffness. Parallel manipulators feature multiple kinematic chains connecting the base to the end-effector, providing higher rigidity, load capacity, and precision due to their closed-loop structure. The structural difference impacts their applications, with serial manipulators favoring flexibility and reach, while parallel manipulators excel in stability and accuracy.
Kinematic Analysis: Serial vs Parallel Systems
Kinematic analysis of serial manipulators involves calculating the position, velocity, and acceleration of each joint in a sequential chain, resulting in straightforward forward and inverse kinematics but increased cumulative error and lower stiffness. Parallel manipulators feature multiple kinematic chains connecting the base to the end-effector, providing higher rigidity, better load distribution, and improved precision but more complex inverse kinematics and limited workspace. The choice between serial and parallel systems depends on specific application requirements such as workspace size, accuracy, and dynamic performance.
Workspace and Reach Capabilities Comparison
Serial manipulators typically offer larger workspaces due to their sequential joint arrangement, allowing extensive reach and maneuverability in three-dimensional space. Parallel manipulators provide higher stiffness and precision within a more confined workspace, often limited by the geometric constraints of their closed-loop kinematic chains. The choice between these manipulators depends on balancing the need for large reach and extensive workspace (favoring serial) versus high accuracy and rigidity in a smaller operational volume (favoring parallel).
Precision and Accuracy: Evaluating Performance
Serial manipulators typically offer higher accuracy due to their simpler kinematic chains, which reduce cumulative errors from joint tolerances and mechanical backlash. Parallel manipulators provide superior precision and stiffness because multiple arms share the load, minimizing deflection and increasing positional repeatability under heavy payloads. Evaluating performance in robotics applications requires balancing the serial manipulator's accuracy with the parallel manipulator's enhanced precision to meet specific operational demands.
Payload Handling: Strengths and Limitations
Serial manipulators typically offer greater reach and flexibility, making them suitable for handling large and varied payloads in complex tasks. Parallel manipulators excel in payload handling due to their high stiffness and load capacity, enabling precise control of heavy objects with superior stability. Limitations of serial manipulators include reduced load capacity and lower rigidity, while parallel manipulators face challenges in workspace size and complex kinematics.
Speed and Dynamics: Motion Control Aspects
Serial manipulators typically exhibit slower speeds and less dynamic performance due to cumulative joint inertia and limited structural rigidity. Parallel manipulators achieve higher speeds and superior acceleration capabilities through their closed-loop kinematic chains, which distribute loads more effectively and enhance motion control precision. The improved stiffness in parallel architectures results in faster response times and better dynamic stability during high-speed tasks.
Application Areas: Industrial and Commercial Uses
Serial manipulators dominate industrial applications such as assembly lines, welding, and material handling due to their large workspace and flexibility. Parallel manipulators excel in high-precision tasks like CNC machining, flight simulators, and robotic surgery where rigidity and load-bearing capacity are critical. Commercial uses leverage the unique strengths of each type, with serial arms favored for packaging and inspection, while parallel systems enhance performance in vibration-sensitive environments.
Cost and Maintenance Considerations
Serial manipulators generally incur lower initial costs due to simpler design and fewer components, making them more accessible for basic automation tasks. Maintenance expenses tend to be higher for serial manipulators because their multiple joints accumulate wear and require frequent calibration and repairs. In contrast, parallel manipulators have higher upfront costs due to complex structures but benefit from lower maintenance needs, enhanced rigidity, and longer operational life, which can reduce total cost of ownership over time.
Future Trends in Manipulator Technology
Future trends in manipulator technology emphasize the integration of advanced sensors and AI algorithms to enhance precision and adaptability in both serial and parallel manipulators. Research focuses on hybrid manipulator designs that combine the high dexterity of serial arms with the stiffness and load capacity of parallel mechanisms to optimize performance in complex tasks. Emerging developments in lightweight materials and real-time control systems are driving the evolution toward more efficient, versatile, and scalable robotic manipulators for industrial and medical applications.
serial manipulator vs parallel manipulator Infographic