Compliance control enables robots to adapt to external forces by adjusting their position in response to interaction, promoting safer collaboration with humans. Impedance control governs the dynamic relationship between force and motion, allowing precise regulation of stiffness, damping, and inertia in robotic manipulators. Both control strategies are essential for effective force management and ensuring adaptability in complex, unstructured environments.
Table of Comparison
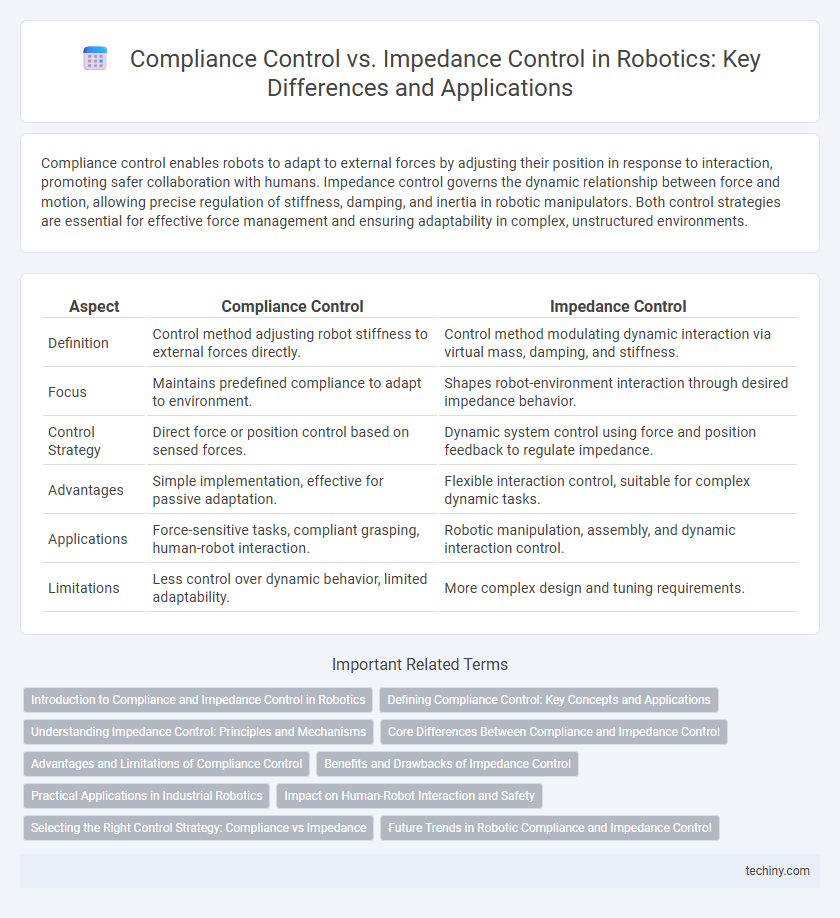
| Aspect | Compliance Control | Impedance Control |
|---|---|---|
| Definition | Control method adjusting robot stiffness to external forces directly. | Control method modulating dynamic interaction via virtual mass, damping, and stiffness. |
| Focus | Maintains predefined compliance to adapt to environment. | Shapes robot-environment interaction through desired impedance behavior. |
| Control Strategy | Direct force or position control based on sensed forces. | Dynamic system control using force and position feedback to regulate impedance. |
| Advantages | Simple implementation, effective for passive adaptation. | Flexible interaction control, suitable for complex dynamic tasks. |
| Applications | Force-sensitive tasks, compliant grasping, human-robot interaction. | Robotic manipulation, assembly, and dynamic interaction control. |
| Limitations | Less control over dynamic behavior, limited adaptability. | More complex design and tuning requirements. |
Introduction to Compliance and Impedance Control in Robotics
Compliance control in robotics enables manipulators to adapt their stiffness and flexibility when interacting with uncertain environments, improving safety and precision. Impedance control regulates the dynamic relationship between force and motion by modulating the robot's mechanical impedance, effectively controlling its response to external forces. Both strategies enhance robot-environment interaction, with compliance control focusing on passive adaptability and impedance control on active force-motion regulation.
Defining Compliance Control: Key Concepts and Applications
Compliance control in robotics enables manipulators to adapt their motion in response to external forces, ensuring safe and flexible interaction with the environment. This control strategy adjusts the robot's stiffness and damping characteristics to achieve desired compliance behaviors, crucial for tasks like assembly, human-robot collaboration, and precision handling. Applications of compliance control span from delicate object manipulation to adaptive force regulation during contact-sensitive operations, enhancing both safety and efficiency.
Understanding Impedance Control: Principles and Mechanisms
Impedance control in robotics regulates the dynamic interaction between a robot and its environment by modulating the relationship between force and motion, creating a compliant behavior that mimics mechanical impedance. This control strategy adjusts stiffness, damping, and inertia parameters to ensure smooth and adaptive responses during contact tasks, enabling safe and precise manipulation. Unlike compliance control, which focuses primarily on position tracking with compliant behavior, impedance control emphasizes force regulation through dynamic system modeling for versatile interaction management.
Core Differences Between Compliance and Impedance Control
Compliance control adjusts a robot's position or force response by directly modifying its stiffness and damping to achieve flexible interactions with the environment. Impedance control regulates the dynamic relationship between force and motion through a virtual mass-spring-damper model, enabling the robot to respond predictably to external forces. The core difference lies in compliance control focusing on achieving desired position or force compliance, while impedance control establishes a defined mechanical impedance for smoother and safer interactions.
Advantages and Limitations of Compliance Control
Compliance control in robotics offers enhanced adaptability to external forces, enabling safer human-robot interaction and improved performance in unstructured environments. Its primary advantage lies in absorbing unexpected impacts and reducing mechanical stress on components. However, compliance control may suffer from limited precision in force regulation and slower response times compared to impedance control, restricting its effectiveness in applications requiring high accuracy.
Benefits and Drawbacks of Impedance Control
Impedance control in robotics offers superior interaction capabilities by modulating the dynamic relationship between force and motion, enabling robots to adapt to varying environments and perform delicate tasks. Benefits include enhanced safety during human-robot collaboration and improved performance in unstructured settings due to flexible compliance. Drawbacks involve increased computational complexity and the need for precise modeling, which can lead to challenges in tuning and real-time implementation.
Practical Applications in Industrial Robotics
Compliance control enables industrial robots to adapt to external forces by adjusting their stiffness, enhancing precision in tasks like assembly and surface finishing. Impedance control regulates the dynamic interaction between the robot and its environment, optimizing performance in applications such as force-sensitive operations and human-robot collaboration. Both control methods are critical for improving safety, flexibility, and efficiency in complex industrial automation processes.
Impact on Human-Robot Interaction and Safety
Compliance control enhances human-robot interaction by allowing robots to adapt their stiffness dynamically, reducing the risk of injury during unexpected collisions. Impedance control optimizes safety by regulating the force and motion relationship between the robot and its environment, ensuring smoother and more predictable responses during physical contact. Both strategies improve collaborative robotics, but compliance control offers superior adaptability in unpredictable human interactions.
Selecting the Right Control Strategy: Compliance vs Impedance
Selecting the right control strategy in robotics depends on the desired interaction dynamics between the robot and its environment. Compliance control allows the robot to yield under external forces, enhancing safety and adaptability during tasks such as assembly or human-robot collaboration. In contrast, impedance control regulates the dynamic relationship between force and motion, providing precise control over stiffness and damping for applications requiring accurate force modulation and trajectory tracking.
Future Trends in Robotic Compliance and Impedance Control
Future trends in robotic compliance and impedance control emphasize adaptive algorithms leveraging machine learning to enhance interaction safety and precision in dynamic environments. Integration of sensor fusion with real-time data processing facilitates more responsive and context-aware compliance behaviors. Advancements in soft robotics materials and bio-inspired actuator designs are driving improved impedance modulation for delicate task execution and human-robot collaboration.
Compliance control vs Impedance control Infographic