Onboard computation in robotics enables real-time processing and immediate decision-making by utilizing the robot's internal hardware, reducing latency and dependence on external networks. Edge computation offloads intensive data processing to nearby edge servers, enhancing computational power and allowing for complex analysis without burdening the robot's onboard systems. Balancing onboard and edge computation optimizes performance, energy efficiency, and responsiveness in robotic applications.
Table of Comparison
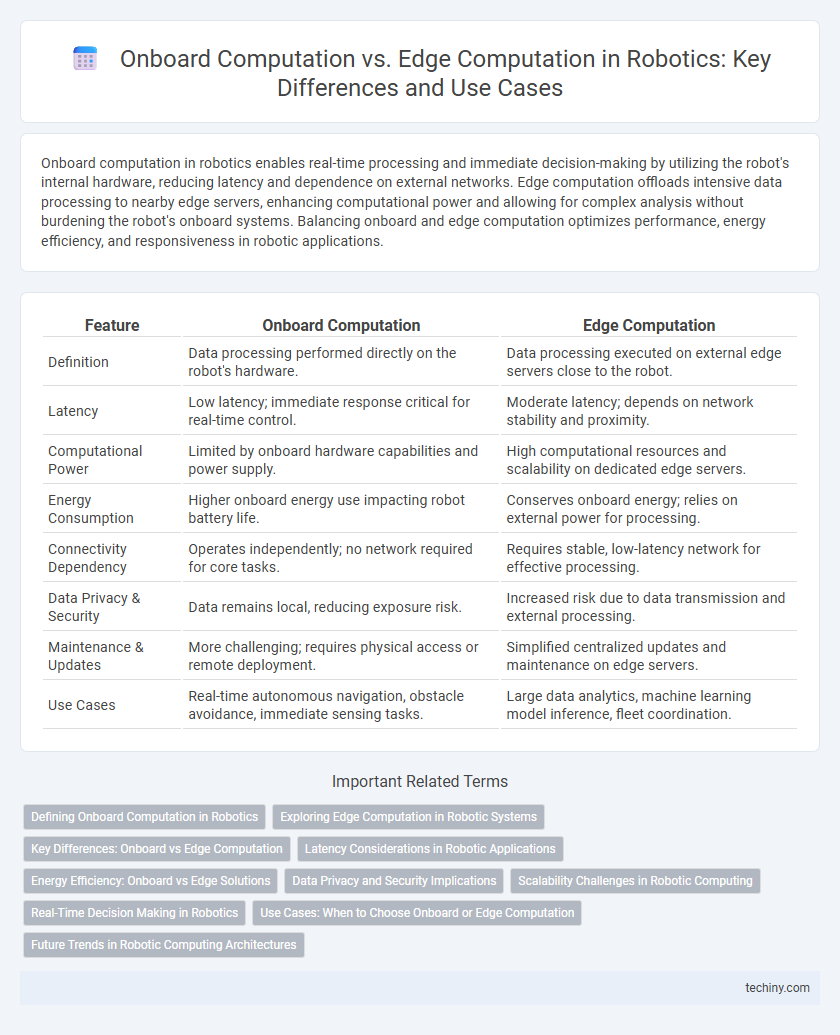
| Feature | Onboard Computation | Edge Computation |
|---|---|---|
| Definition | Data processing performed directly on the robot's hardware. | Data processing executed on external edge servers close to the robot. |
| Latency | Low latency; immediate response critical for real-time control. | Moderate latency; depends on network stability and proximity. |
| Computational Power | Limited by onboard hardware capabilities and power supply. | High computational resources and scalability on dedicated edge servers. |
| Energy Consumption | Higher onboard energy use impacting robot battery life. | Conserves onboard energy; relies on external power for processing. |
| Connectivity Dependency | Operates independently; no network required for core tasks. | Requires stable, low-latency network for effective processing. |
| Data Privacy & Security | Data remains local, reducing exposure risk. | Increased risk due to data transmission and external processing. |
| Maintenance & Updates | More challenging; requires physical access or remote deployment. | Simplified centralized updates and maintenance on edge servers. |
| Use Cases | Real-time autonomous navigation, obstacle avoidance, immediate sensing tasks. | Large data analytics, machine learning model inference, fleet coordination. |
Defining Onboard Computation in Robotics
Onboard computation in robotics refers to the processing of data directly within the robot using embedded processors, sensors, and control units, enabling real-time decision-making without reliance on external networks. This approach enhances latency reduction, reliability, and autonomy by minimizing data transmission delays and dependency on cloud services. Onboard computation is critical for tasks requiring immediate feedback, such as obstacle avoidance, motor control, and sensor fusion in autonomous systems.
Exploring Edge Computation in Robotic Systems
Edge computation in robotic systems processes data locally on devices such as sensors, controllers, and embedded computers, reducing latency and dependence on cloud connectivity. This approach enhances real-time decision-making, autonomy, and energy efficiency by minimizing data transmission and enabling faster reactions to environmental changes. Implementing edge computation supports complex tasks like object recognition, obstacle avoidance, and sensor fusion directly on the robot, improving overall system reliability and operational safety.
Key Differences: Onboard vs Edge Computation
Onboard computation in robotics processes data locally within the robot's hardware, enabling real-time decision-making and reducing latency. Edge computation, by contrast, uses nearby external devices or servers to handle processing tasks, allowing for greater computational power and storage capacity but potentially introducing communication delays. The key difference lies in the trade-off between immediacy and resource availability, with onboard systems favoring speed and edge systems prioritizing scalability and complex data analysis.
Latency Considerations in Robotic Applications
Onboard computation in robotics offers minimal latency by processing data directly within the robot, enabling real-time decision-making crucial for tasks like autonomous navigation and obstacle avoidance. Edge computation introduces slight latency due to data transmission to nearby edge servers, but provides enhanced processing power and resource management for complex algorithms such as computer vision and sensor fusion. Latency considerations dictate the choice between onboard and edge computing architectures, balancing immediate response needs with computational demands in robotic applications.
Energy Efficiency: Onboard vs Edge Solutions
Onboard computation in robotics offers significant energy efficiency by minimizing data transmission and reducing latency, which conserves battery life during real-time processing tasks. Edge computation, while powerful for complex algorithm processing, often incurs higher energy costs due to data transfer to nearby servers and increased communication overhead. Optimizing energy efficiency in robotic systems requires balancing onboard processing capabilities with selective offloading to edge devices based on task complexity and power availability.
Data Privacy and Security Implications
Onboard computation in robotics enhances data privacy by processing sensitive information directly within the robot, minimizing exposure to external networks and reducing vulnerability to cyberattacks. Edge computation, while enabling real-time data analysis and resource efficiency, introduces potential security risks as data travels between devices and edge servers, requiring robust encryption and access controls. Balancing onboard and edge computation strategies is critical to maintaining stringent privacy standards and safeguarding robotic systems from unauthorized data breaches.
Scalability Challenges in Robotic Computing
Onboard computation in robotics faces scalability challenges due to limited processing power and energy constraints inherent in embedded systems. Edge computation offers enhanced scalability by offloading complex tasks to nearby servers, enabling real-time data analysis and improved robotic performance. However, reliance on network connectivity and latency can affect the efficiency of edge-based robotic applications.
Real-Time Decision Making in Robotics
Onboard computation enables real-time decision making in robotics by processing sensor data directly on the robot, minimizing latency and ensuring immediate responsiveness critical for tasks like obstacle avoidance and motion control. Edge computation offers enhanced processing power and data aggregation by offloading complex computations to nearby servers, but may introduce latency issues unsuitable for time-sensitive robotic operations. Balancing onboard and edge computation optimizes performance, reliability, and efficiency in autonomous robotic systems.
Use Cases: When to Choose Onboard or Edge Computation
Onboard computation in robotics is ideal for latency-sensitive tasks such as real-time navigation, obstacle avoidance, and autonomous decision-making where immediate data processing is crucial. Edge computation is preferred for complex data analysis, machine learning model updates, and collaborative multi-robot systems that require cloud integration and higher computational power. Selecting between onboard and edge computation depends on factors like network reliability, power constraints, and the complexity of algorithms involved in the robotic application.
Future Trends in Robotic Computing Architectures
Future trends in robotic computing architectures emphasize a hybrid approach combining onboard computation with edge computation to optimize processing speed and energy efficiency. Onboard computation ensures real-time decision-making and autonomy by processing sensor data locally within the robot's hardware. Edge computation enhances capabilities by offloading complex tasks such as machine learning model updates and large-scale data analysis to nearby servers, reducing latency while supporting scalable and adaptive robotic systems.
Onboard computation vs Edge computation Infographic