Tactile sensing provides robots with the ability to detect physical contact, enabling precise manipulation and interaction with objects through pressure, texture, and force feedback. Proximity sensing allows robots to perceive objects at a distance without physical contact, enhancing navigation and obstacle avoidance by detecting the presence and position of nearby items. Combining both sensing types improves robotic perception, offering a comprehensive understanding of the environment for advanced tasks and safer operation.
Table of Comparison
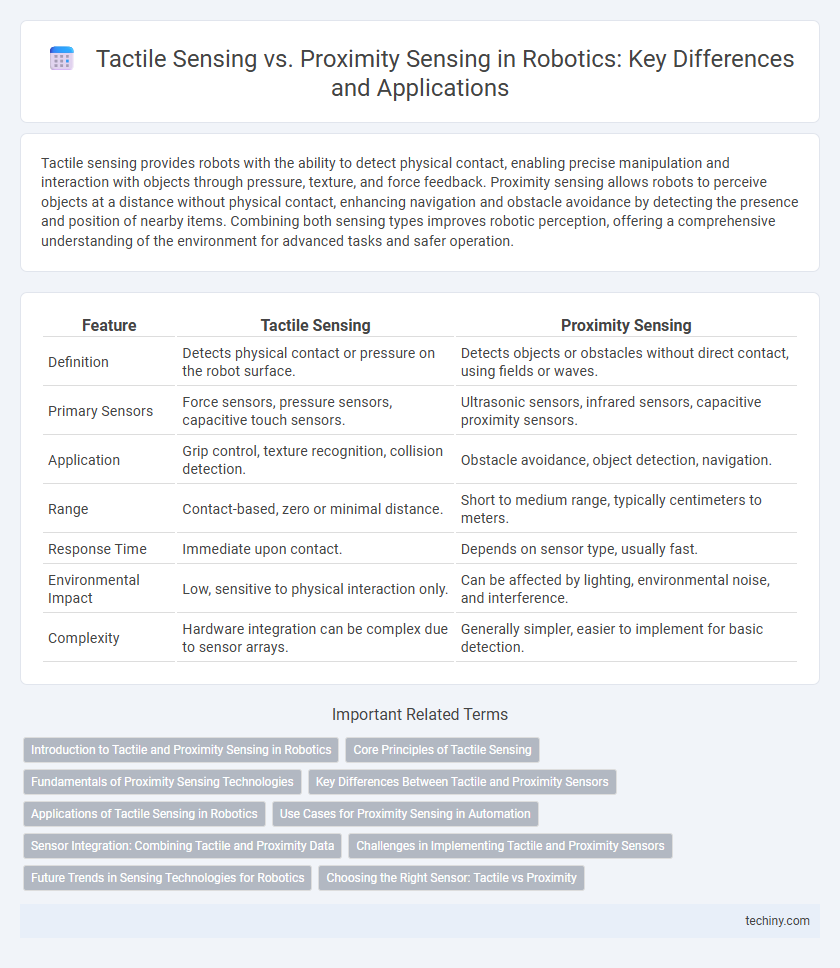
| Feature | Tactile Sensing | Proximity Sensing |
|---|---|---|
| Definition | Detects physical contact or pressure on the robot surface. | Detects objects or obstacles without direct contact, using fields or waves. |
| Primary Sensors | Force sensors, pressure sensors, capacitive touch sensors. | Ultrasonic sensors, infrared sensors, capacitive proximity sensors. |
| Application | Grip control, texture recognition, collision detection. | Obstacle avoidance, object detection, navigation. |
| Range | Contact-based, zero or minimal distance. | Short to medium range, typically centimeters to meters. |
| Response Time | Immediate upon contact. | Depends on sensor type, usually fast. |
| Environmental Impact | Low, sensitive to physical interaction only. | Can be affected by lighting, environmental noise, and interference. |
| Complexity | Hardware integration can be complex due to sensor arrays. | Generally simpler, easier to implement for basic detection. |
Introduction to Tactile and Proximity Sensing in Robotics
Tactile sensing in robotics involves physical contact with objects to detect texture, force, and pressure, enabling precise manipulation and interaction. Proximity sensing detects the presence of nearby objects without contact, using technologies like infrared, ultrasonic, or capacitive sensors to prevent collisions and guide movements. Both sensing types are essential for robotics applications that require environmental awareness and responsive handling of diverse tasks.
Core Principles of Tactile Sensing
Tactile sensing relies on detecting physical contact forces, pressure, and texture through sensors embedded in robotic skins or fingertips, enabling precise manipulation and interaction with objects. Core principles include measuring deformation, strain, or vibrations caused by touch, often using piezoresistive, capacitive, or optical sensor technologies. This direct physical feedback contrasts with proximity sensing, which detects objects without contact, emphasizing the critical role of tactile sensing in tasks requiring fine-grained force control and texture discrimination.
Fundamentals of Proximity Sensing Technologies
Proximity sensing technologies in robotics detect objects without direct contact by using methods such as infrared, ultrasonic, capacitive, and inductive sensing to measure distance or presence. Infrared sensors emit light waves and detect reflections to gauge proximity, while ultrasonic sensors send sound waves that reflect off objects to calculate range through time-of-flight measurement. Capacitive and inductive sensors detect changes in electric or magnetic fields caused by nearby objects, offering reliable detection for various materials and environments.
Key Differences Between Tactile and Proximity Sensors
Tactile sensors detect physical contact and measure properties like pressure, texture, and force, allowing robots to interact directly with objects. Proximity sensors identify the presence or absence of objects within a certain range without physical contact, using technologies such as infrared, ultrasound, or capacitive detection. Key differences include tactile sensors providing detailed surface information through touch, while proximity sensors enable obstacle detection and spatial awareness from a distance.
Applications of Tactile Sensing in Robotics
Tactile sensing in robotics enables precise manipulation by detecting texture, pressure, and force, essential for tasks like object recognition and delicate assembly. It allows robots to interact safely with humans by sensing touch and avoiding excessive force. Applications include prosthetics, robotic surgery, and automated quality control in manufacturing, where nuanced physical feedback is critical.
Use Cases for Proximity Sensing in Automation
Proximity sensing in automation enables robots to detect objects without physical contact, crucial for tasks requiring precise positioning and collision avoidance in dynamic environments like manufacturing and assembly lines. It enhances safety by preventing unintended interactions between robots and humans or other machinery, especially in collaborative robots (cobots). Common use cases include pick-and-place operations, conveyor belt monitoring, and automated guided vehicle (AGV) navigation, where real-time object detection ensures efficient and smooth workflow.
Sensor Integration: Combining Tactile and Proximity Data
Integrating tactile sensing with proximity sensing enhances robotic perception by combining direct contact feedback with non-contact object detection, enabling more accurate and adaptive interactions. Sensor fusion algorithms process tactile pressure data alongside proximity measurements, improving obstacle avoidance, object manipulation, and environmental mapping. This multimodal approach optimizes robotic performance in complex tasks by leveraging complementary sensor strengths for real-time decision-making.
Challenges in Implementing Tactile and Proximity Sensors
Implementing tactile sensors in robotics faces challenges such as achieving high resolution, durability under mechanical stress, and processing complex data for accurate touch perception. Proximity sensors encounter difficulties related to interference from environmental factors like lighting and electromagnetic noise, as well as limitations in sensing range and object material properties. Both sensor types require advanced integration with artificial intelligence algorithms to ensure reliable and real-time object detection and manipulation in dynamic environments.
Future Trends in Sensing Technologies for Robotics
Advancements in tactile sensing are rapidly enhancing robotic dexterity by integrating high-resolution pressure sensors and flexible materials that mimic human skin, enabling precise manipulation and improved safety in human-robot interaction. Proximity sensing technologies are evolving with sophisticated LiDAR and ultrasonic sensors that offer greater range and environmental adaptability, crucial for autonomous navigation and obstacle avoidance. Future trends emphasize the fusion of tactile and proximity data through AI-driven sensor fusion algorithms, creating more perceptive and responsive robotic systems capable of complex tasks in dynamic environments.
Choosing the Right Sensor: Tactile vs Proximity
Tactile sensing offers precise contact feedback essential for tasks requiring grip adjustment, force measurement, and surface texture recognition, while proximity sensing excels in detecting objects without physical contact, enabling obstacle avoidance and spatial awareness. Selecting the right sensor hinges on the specific robotic application: tactile sensors suit manipulation and fine motor tasks, whereas proximity sensors optimize navigation and early object detection. Integrating both types can enhance robotic perception by combining tactile precision with proactive environment monitoring.
Tactile sensing vs Proximity sensing Infographic