Workspace refers to the physical environment in which a robot operates, encompassing all reachable points the robot's end-effector can access. Configuration space, or C-space, represents all possible positions and orientations of the robot's joints, providing a higher-dimensional map for path planning and collision avoidance. Understanding the relationship between workspace and configuration space is crucial for optimizing robotic motion and ensuring efficient navigation.
Table of Comparison
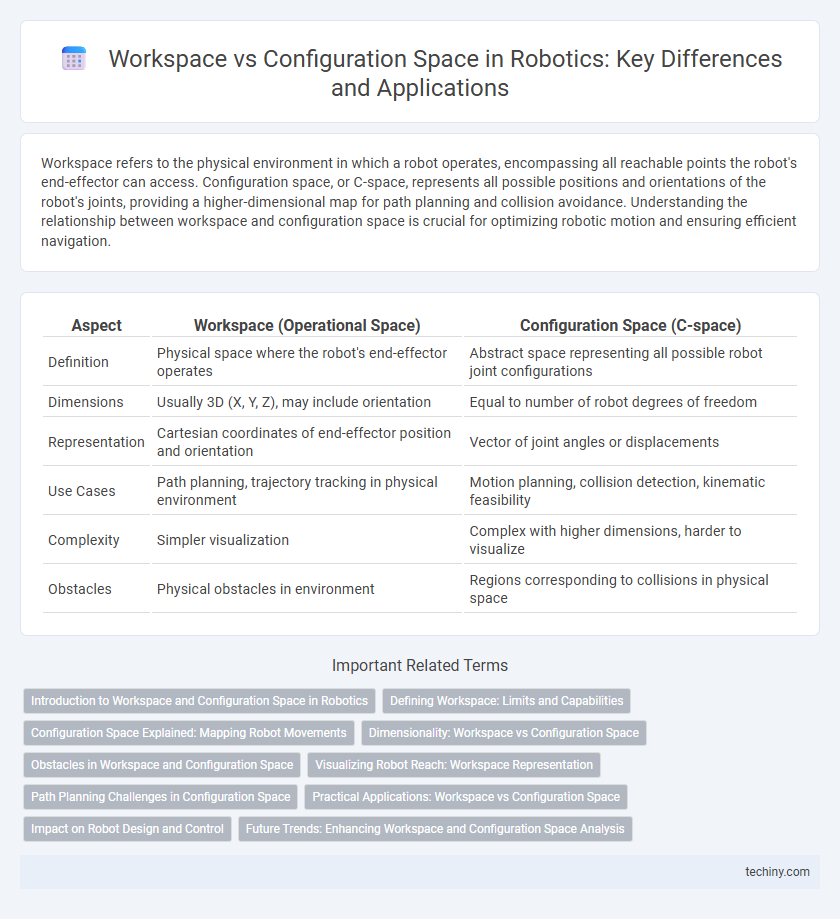
| Aspect | Workspace (Operational Space) | Configuration Space (C-space) |
|---|---|---|
| Definition | Physical space where the robot's end-effector operates | Abstract space representing all possible robot joint configurations |
| Dimensions | Usually 3D (X, Y, Z), may include orientation | Equal to number of robot degrees of freedom |
| Representation | Cartesian coordinates of end-effector position and orientation | Vector of joint angles or displacements |
| Use Cases | Path planning, trajectory tracking in physical environment | Motion planning, collision detection, kinematic feasibility |
| Complexity | Simpler visualization | Complex with higher dimensions, harder to visualize |
| Obstacles | Physical obstacles in environment | Regions corresponding to collisions in physical space |
Introduction to Workspace and Configuration Space in Robotics
Workspace in robotics refers to the physical volume or area where a robot can operate and manipulate objects, defined by its reach and joint capabilities. Configuration space (C-space) represents all possible positions and orientations of the robot's joints, capturing the robot's internal state rather than its external environment. Understanding both workspace and configuration space is essential for path planning, collision avoidance, and robot motion control.
Defining Workspace: Limits and Capabilities
The workspace in robotics defines the physical volume within which a robot's end-effector can operate, encompassing all reachable positions and orientations. It is constrained by the robot's joint limits, link lengths, and mechanical design, directly influencing task feasibility and precision. Analyzing workspace boundaries is essential for optimizing robot deployment and avoiding singularities or collisions in operational environments.
Configuration Space Explained: Mapping Robot Movements
Configuration space (C-space) represents all possible positions and orientations of a robot, enabling precise mapping of its movements within a defined workspace. By abstracting the robot's degrees of freedom into a multidimensional space, C-space facilitates collision detection and path planning, avoiding obstacles effectively. This mathematical model simplifies complex robotic motion by transforming physical constraints into spatial relationships within the configuration space.
Dimensionality: Workspace vs Configuration Space
The workspace of a robot refers to the physical volume or area that its end-effector can reach, typically represented in three-dimensional Cartesian coordinates. Configuration space (C-space) encompasses all possible positions and orientations of the robot's joints or links, often resulting in higher-dimensional spaces corresponding to each degree of freedom. Dimensionality in workspace is fixed by spatial dimensions (usually 3D), whereas configuration space dimensionality expands combinatorially with the robot's joint parameters, making it essential for motion planning and collision avoidance algorithms.
Obstacles in Workspace and Configuration Space
Obstacles in the workspace represent physical barriers that a robot must navigate around, defined by the robot's environment and geometry. In configuration space, these workspace obstacles are transformed into regions that capture all possible robot states resulting in collisions, effectively extending the obstacle's complexity due to the robot's degrees of freedom. The configuration space obstacle mapping enables motion planning algorithms to systematically avoid collisions by considering joint parameters and robot kinematics rather than just spatial positions.
Visualizing Robot Reach: Workspace Representation
Workspace represents the physical area a robot's end-effector can reach, while configuration space maps all possible joint parameters defining robot poses. Visualizing workspace involves rendering the reachable volume in Cartesian space, aiding in task planning and collision avoidance. Effective workspace representation enhances understanding of a robot's operational limits and optimal positioning in dynamic environments.
Path Planning Challenges in Configuration Space
Path planning in configuration space involves navigating a high-dimensional space that represents all possible robot positions and orientations, making obstacle avoidance computationally intensive. The complexity increases with the robot's degrees of freedom, requiring advanced algorithms to efficiently search and optimize feasible paths. Challenges include handling non-linear constraints, collision detection, and dynamic environments to ensure safe and practical robot motion.
Practical Applications: Workspace vs Configuration Space
Workspace represents the physical volume a robot's end-effector can reach, critical for tasks like painting or welding where spatial coverage matters. Configuration space (C-space) describes all possible joint parameters, essential for collision-free path planning and motion control in complex environments. Practical robotics seamlessly integrates workspace analysis for reachability and C-space algorithms for precise, obstacle-aware navigation.
Impact on Robot Design and Control
Workspace defines the physical volume a robot's end-effector can reach, directly influencing mechanical structure and actuator placement in robot design. Configuration space represents all possible joint parameters, guiding control algorithms to navigate collision-free paths and optimize movement efficiency. Understanding the interplay between workspace and configuration space improves robot precision, safety, and operational flexibility in complex environments.
Future Trends: Enhancing Workspace and Configuration Space Analysis
Future trends in robotics emphasize integrating advanced machine learning algorithms to improve workspace and configuration space analysis, enabling real-time adaptability in complex environments. Enhanced sensor fusion techniques combined with high-resolution mapping allow robots to navigate and manipulate objects with unprecedented precision. These innovations drive more efficient path planning and obstacle avoidance, expanding the operational capabilities of autonomous systems.
Workspace vs configuration space Infographic