Kinematics in robotics analyzes the motion of robots without considering forces, focusing on position, velocity, and acceleration of robotic joints and end-effectors. Dynamics examines the forces and torques that cause this motion, essential for controlling robot movement and ensuring stability under varying loads. Understanding the distinction between kinematics and dynamics is crucial for designing precise and efficient robotic systems.
Table of Comparison
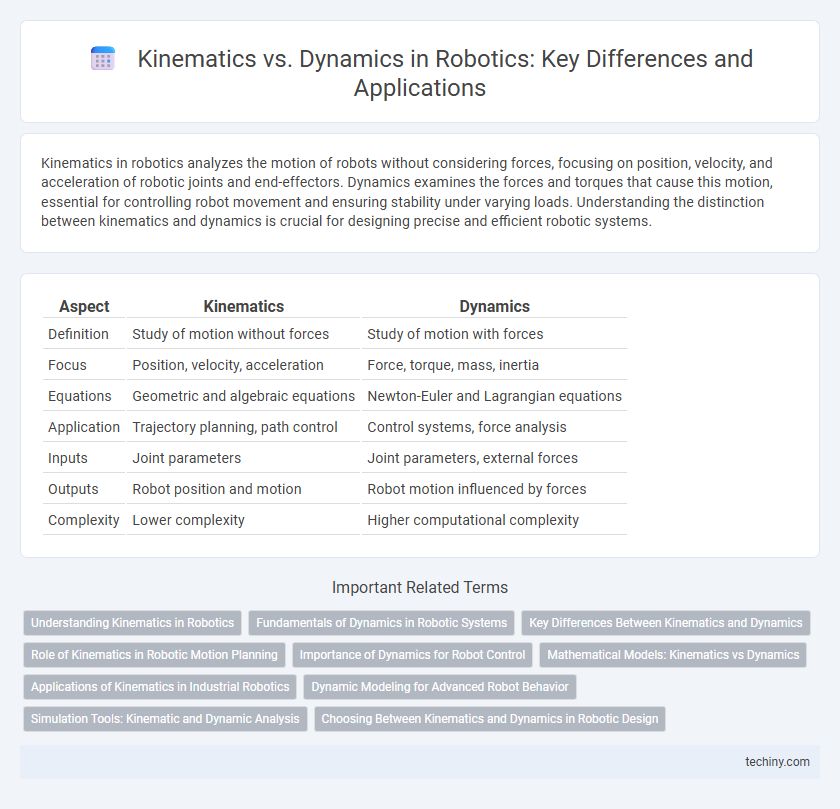
| Aspect | Kinematics | Dynamics |
|---|---|---|
| Definition | Study of motion without forces | Study of motion with forces |
| Focus | Position, velocity, acceleration | Force, torque, mass, inertia |
| Equations | Geometric and algebraic equations | Newton-Euler and Lagrangian equations |
| Application | Trajectory planning, path control | Control systems, force analysis |
| Inputs | Joint parameters | Joint parameters, external forces |
| Outputs | Robot position and motion | Robot motion influenced by forces |
| Complexity | Lower complexity | Higher computational complexity |
Understanding Kinematics in Robotics
Understanding kinematics in robotics involves analyzing the motion of robotic components without considering the forces that cause the movement. It focuses on parameters such as position, velocity, and acceleration of robot arms, joints, and end-effectors to enable precise control and trajectory planning. Kinematic models form the foundation for robotic path planning, inverse kinematics, and simulation in automated systems.
Fundamentals of Dynamics in Robotic Systems
Fundamentals of dynamics in robotic systems involve analyzing forces and torques that cause motion, unlike kinematics which studies motion without regard to forces. Dynamics incorporates Newton-Euler equations and Lagrangian mechanics to model robot behavior under external inputs, enabling accurate prediction of accelerations and control responses. Understanding dynamics is critical for designing control algorithms that ensure stability, precision, and efficient energy use in robotic manipulators and mobile robots.
Key Differences Between Kinematics and Dynamics
Kinematics studies the motion of robots without considering the forces causing the motion, focusing on parameters such as position, velocity, and acceleration. Dynamics analyzes the relationship between forces, torques, and motion, incorporating mass, inertia, and external loads to predict the robot's behavior under various conditions. Understanding these distinctions is crucial for designing control algorithms that ensure precise movement and stability in robotic systems.
Role of Kinematics in Robotic Motion Planning
Kinematics plays a crucial role in robotic motion planning by defining the spatial relationships and movement trajectories of a robot's joints and links without considering the forces involved. It enables precise calculation of position, velocity, and acceleration for each component, ensuring smooth and collision-free paths. Accurate kinematic models facilitate real-time adjustments, enhancing the efficiency and reliability of autonomous robotic operations.
Importance of Dynamics for Robot Control
Robot dynamics encompasses the forces and torques influencing motion, offering critical insights for precise control in robotic systems. Understanding dynamics enables accurate prediction of a robot's response to control inputs, essential for stability and performance during complex maneuvers. Unlike kinematics, which deals only with motion geometry, dynamics integrates mass, inertia, and external forces, making it indispensable for developing advanced control algorithms.
Mathematical Models: Kinematics vs Dynamics
Kinematics involves mathematical models that describe the motion of robots using variables such as position, velocity, and acceleration without considering the forces causing the movement. Dynamics incorporates equations of motion derived from Newton-Euler or Lagrangian formulations, which relate forces, torques, and inertia to the robot's motion. These mathematical models are essential for accurate control strategies, trajectory planning, and simulation in robotic systems.
Applications of Kinematics in Industrial Robotics
Kinematics in industrial robotics enables precise control of robot motion by calculating positions, velocities, and accelerations without considering forces or torques. It is essential for path planning, trajectory generation, and real-time motion control in assembly lines, pick-and-place operations, and welding processes. This focus on geometric and temporal parameters enhances efficiency, accuracy, and repeatability in automated manufacturing environments.
Dynamic Modeling for Advanced Robot Behavior
Dynamic modeling in robotics involves the mathematical representation of forces and torques acting on robot components, enabling precise prediction of motion under varying loads and environments. Unlike kinematics, which addresses motion geometry and position without considering forces, dynamic modeling accounts for inertia, friction, and actuation effects critical for advanced control algorithms. Incorporating dynamic models enhances robot stability, accuracy, and responsiveness in complex tasks such as manipulation, locomotion, and human-robot interaction.
Simulation Tools: Kinematic and Dynamic Analysis
Simulation tools for robotics integrate both kinematic and dynamic analysis to optimize robot design and control. Kinematic analysis tools focus on joint positions, velocities, and accelerations without considering forces, enabling path planning and motion simulation. Dynamic simulation incorporates forces, torques, and inertia to predict real-world robot behavior under varying loads and interactions, essential for precise control and performance evaluation.
Choosing Between Kinematics and Dynamics in Robotic Design
Kinematics focuses on the motion of robots without considering forces, making it ideal for trajectory planning and simple manipulators where precision in position and velocity is critical. Dynamics involves the study of forces and torques, essential for accurate control in robots interacting with variable environments or requiring real-time force adjustments. Choosing between kinematics and dynamics depends on the robot's application complexity, with dynamic analysis favored for tasks demanding interaction with unpredictable external forces and kinematics suitable for predefined, controlled movements.
Kinematics vs Dynamics Infographic