Robot Operating System (ROS) offers an open-source, flexible framework that supports a wide range of robotics applications through standardized communication protocols and tools. Proprietary middleware often provides specialized, optimized performance tailored to specific hardware but can limit interoperability and community-driven development. Choosing between ROS and proprietary middleware depends on the project's need for customization, scalability, and support ecosystem.
Table of Comparison
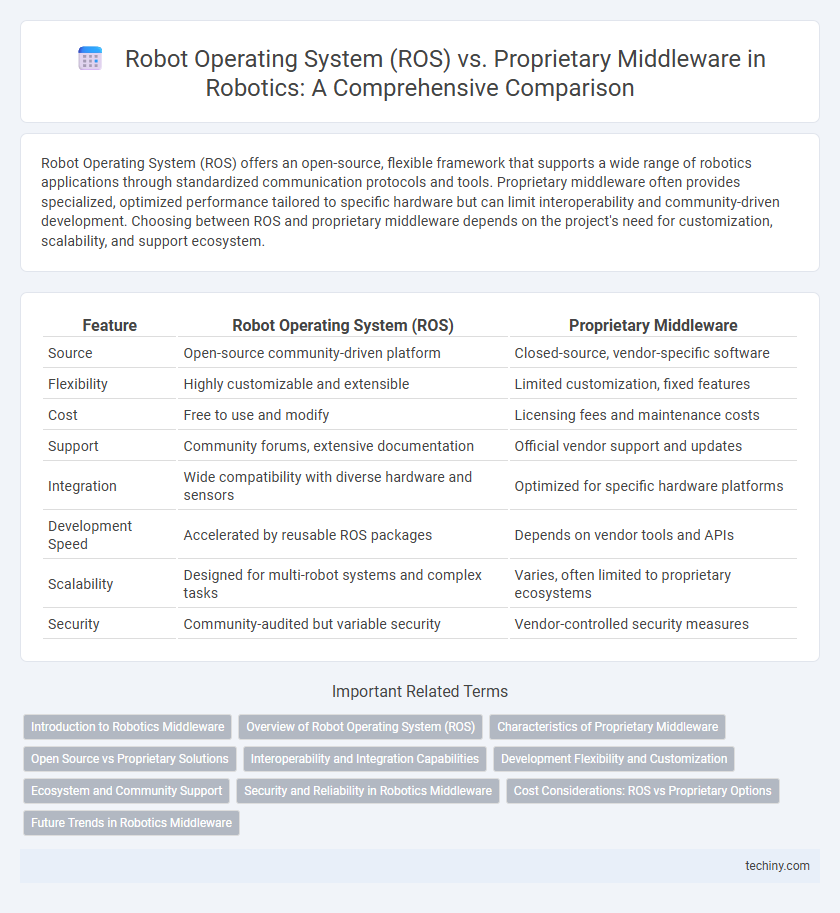
| Feature | Robot Operating System (ROS) | Proprietary Middleware |
|---|---|---|
| Source | Open-source community-driven platform | Closed-source, vendor-specific software |
| Flexibility | Highly customizable and extensible | Limited customization, fixed features |
| Cost | Free to use and modify | Licensing fees and maintenance costs |
| Support | Community forums, extensive documentation | Official vendor support and updates |
| Integration | Wide compatibility with diverse hardware and sensors | Optimized for specific hardware platforms |
| Development Speed | Accelerated by reusable ROS packages | Depends on vendor tools and APIs |
| Scalability | Designed for multi-robot systems and complex tasks | Varies, often limited to proprietary ecosystems |
| Security | Community-audited but variable security | Vendor-controlled security measures |
Introduction to Robotics Middleware
Robot Operating System (ROS) offers an open-source, modular framework that facilitates seamless communication between sensors, actuators, and control algorithms, promoting interoperability across various robotic platforms. Proprietary middleware solutions often provide specialized, optimized performance tailored to specific hardware but may limit flexibility and community-driven development. ROS's extensive libraries and active user base accelerate prototyping and deployment, positioning it as a versatile alternative to closed-source middleware in robotics applications.
Overview of Robot Operating System (ROS)
Robot Operating System (ROS) is an open-source middleware framework designed to facilitate robot software development through modular architecture, standardized message-passing, and extensive libraries. ROS supports multi-robot systems and offers tools for hardware abstraction, device drivers, communication between processes, and package management. Its widespread adoption accelerates innovation by promoting code reuse and interoperability across diverse robotic platforms compared to proprietary middleware solutions.
Characteristics of Proprietary Middleware
Proprietary middleware in robotics typically offers tailored solutions with optimized performance for specific hardware, ensuring seamless integration and enhanced real-time capabilities. Unlike Robot Operating System (ROS), proprietary systems often prioritize security, stability, and vendor support, which can lead to reduced customization and higher costs. These middleware platforms are designed for dedicated applications where predictability and reliability are critical, often including exclusive tools and protocols not available in open-source alternatives.
Open Source vs Proprietary Solutions
Robot Operating System (ROS) offers an open-source middleware framework that promotes collaboration, rapid prototyping, and extensive community-driven libraries, enabling greater flexibility and cost-effectiveness for robotics development. Proprietary middleware solutions provide optimized performance, dedicated technical support, and tighter integration with specific hardware, but often at higher costs and with limited customization options. The choice between ROS and proprietary systems depends on project requirements for scalability, customization, budget constraints, and long-term support needs.
Interoperability and Integration Capabilities
Robot Operating System (ROS) offers superior interoperability through its open-source framework, enabling seamless integration with a wide array of sensors, actuators, and third-party software components. Proprietary middleware often restricts connectivity due to closed protocols and limited customization, hindering flexibility in multi-vendor environments. ROS's modular architecture and standard communication interfaces facilitate efficient collaboration across diverse robotic platforms and accelerate development cycles.
Development Flexibility and Customization
Robot Operating System (ROS) offers unparalleled development flexibility with an extensive ecosystem of open-source packages, enabling seamless integration and customization tailored to specific robotic applications. Proprietary middleware often restricts access to source code and limits adaptability, hindering rapid prototyping and modification. ROS's modular architecture and community-driven support facilitate scalable solutions and efficient innovation in robot software development.
Ecosystem and Community Support
Robot Operating System (ROS) offers a vast ecosystem with extensive community support, including thousands of open-source packages, tools, and tutorials that accelerate development and troubleshooting. Proprietary middleware often provides specialized features and dedicated support but lacks the collaborative innovation and breadth of resources available in ROS. The ROS community's continuous contributions enhance interoperability and scalability, making it the preferred choice for research and commercial robotics applications.
Security and Reliability in Robotics Middleware
Robot Operating System (ROS) offers an open-source framework with extensive community support, enhancing transparency and enabling rapid vulnerability patching, which improves security in robotics middleware. Proprietary middleware often provides tailored security features and rigorous testing protocols that ensure higher reliability and compliance with industry-specific standards. While ROS's modular architecture facilitates flexible integration and continuous updates, proprietary solutions typically emphasize hardened environments and dedicated technical support for mission-critical applications.
Cost Considerations: ROS vs Proprietary Options
Robot Operating System (ROS) offers a cost-effective solution by providing open-source middleware that eliminates expensive licensing fees associated with proprietary options. Proprietary middleware often incurs high upfront costs and ongoing maintenance expenses, limiting flexibility for budget-conscious robotics projects. Choosing ROS enables developers to leverage a vast community-driven ecosystem, reducing financial barriers and accelerating innovation without sacrificing functionality.
Future Trends in Robotics Middleware
Robot Operating System (ROS) continues to dominate as an open-source middleware platform, fostering extensive collaboration and rapid innovation across robotics development. Proprietary middleware solutions emphasize specialized, industry-specific features and enhanced security tailored for commercial applications in sectors such as manufacturing and healthcare. Future trends indicate hybrid frameworks combining ROS's modular architecture with proprietary enhancements, promoting interoperability, real-time processing, and AI integration to accelerate autonomous system capabilities.
Robot Operating System (ROS) vs proprietary middleware Infographic