Proprioceptive sensors provide internal feedback by measuring a robot's joint angles, motor currents, and body positions, enabling precise control of movement and stability. Exteroceptive sensors gather external information from the environment through cameras, LiDAR, or ultrasonic sensors to detect obstacles and map surroundings. Integrating both sensor types enhances robotic autonomy by combining accurate self-awareness with effective environmental perception.
Table of Comparison
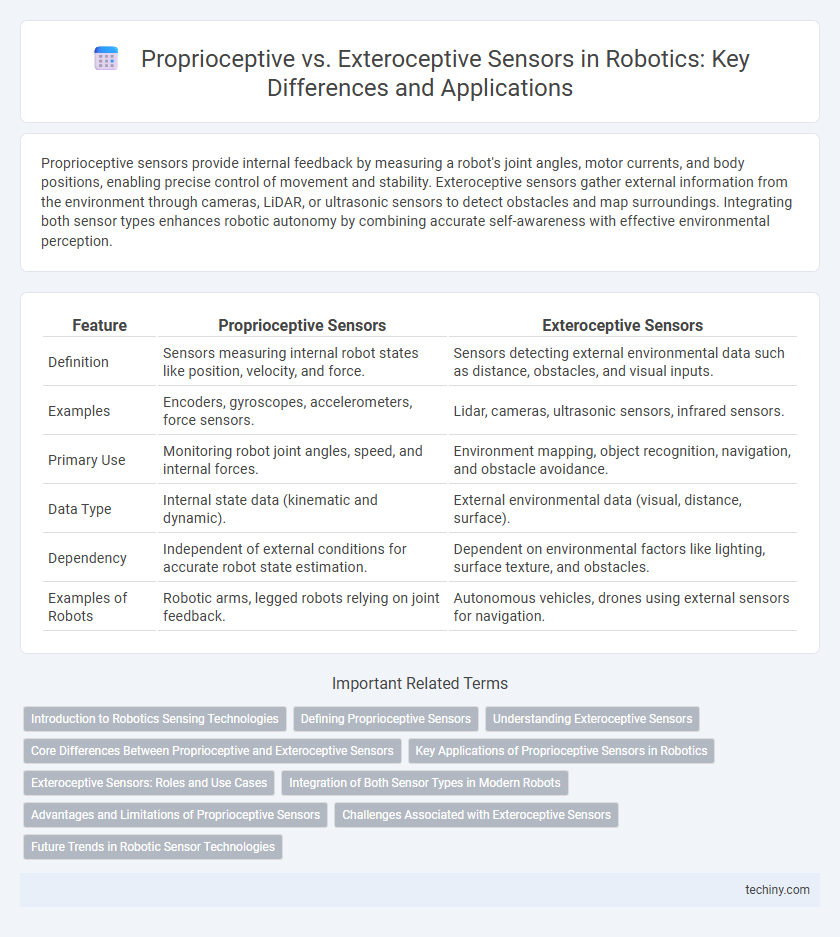
| Feature | Proprioceptive Sensors | Exteroceptive Sensors |
|---|---|---|
| Definition | Sensors measuring internal robot states like position, velocity, and force. | Sensors detecting external environmental data such as distance, obstacles, and visual inputs. |
| Examples | Encoders, gyroscopes, accelerometers, force sensors. | Lidar, cameras, ultrasonic sensors, infrared sensors. |
| Primary Use | Monitoring robot joint angles, speed, and internal forces. | Environment mapping, object recognition, navigation, and obstacle avoidance. |
| Data Type | Internal state data (kinematic and dynamic). | External environmental data (visual, distance, surface). |
| Dependency | Independent of external conditions for accurate robot state estimation. | Dependent on environmental factors like lighting, surface texture, and obstacles. |
| Examples of Robots | Robotic arms, legged robots relying on joint feedback. | Autonomous vehicles, drones using external sensors for navigation. |
Introduction to Robotics Sensing Technologies
Proprioceptive sensors in robotics measure internal states such as joint angles, motor currents, and body orientation, providing critical feedback for motion control and balance. Exteroceptive sensors gather information from the external environment using devices like cameras, lidar, and ultrasonic sensors, enabling obstacle detection and mapping. Effective integration of proprioceptive and exteroceptive sensing technologies enhances robot autonomy and situational awareness.
Defining Proprioceptive Sensors
Proprioceptive sensors measure internal states of a robot, such as joint angles, motor currents, and body orientation, enabling accurate self-awareness and control. These sensors include encoders, gyroscopes, and accelerometers that provide critical feedback for maintaining balance and executing precise movements. Unlike exteroceptive sensors that detect external environmental data, proprioceptive sensors allow robots to assess their own posture and motion internally.
Understanding Exteroceptive Sensors
Exteroceptive sensors in robotics gather information about the external environment, enabling robots to perceive objects, obstacles, and spatial conditions through modalities such as vision, lidar, sonar, and tactile sensors. These sensors complement proprioceptive sensors, which monitor internal states like joint angles and motor currents, by providing situational awareness critical for navigation, manipulation, and interaction tasks. Effective integration of exteroceptive sensor data enhances robotic autonomy, environmental mapping, and obstacle avoidance performance.
Core Differences Between Proprioceptive and Exteroceptive Sensors
Proprioceptive sensors measure internal states of a robotic system, such as joint angles, velocity, and motor currents, providing data essential for real-time control and balance. Exteroceptive sensors detect external environmental information like distance, temperature, and visual cues, enabling robots to navigate and interact with surroundings. Core differences lie in their source of data--internal versus external--and their roles in feedback control versus environmental perception.
Key Applications of Proprioceptive Sensors in Robotics
Proprioceptive sensors in robotics play a crucial role in monitoring internal states such as joint angles, motor currents, and body posture, enabling precise motion control and balance. These sensors are key in applications like robotic arms for accurate positioning, legged robots for gait adaptation, and autonomous drones for real-time stability adjustment. Their ability to provide continuous feedback on the robot's internal conditions enhances overall system reliability and performance in complex, dynamic environments.
Exteroceptive Sensors: Roles and Use Cases
Exteroceptive sensors in robotics detect external environmental factors such as light, sound, temperature, and proximity, enabling robots to navigate and interact accurately within their surroundings. Common types include lidar, sonar, cameras, and infrared sensors, which provide crucial data for obstacle avoidance, mapping, and object recognition. These sensors play an essential role in autonomous vehicles, industrial automation, and service robots by enhancing situational awareness and decision-making capabilities.
Integration of Both Sensor Types in Modern Robots
Modern robots achieve enhanced autonomy and precision by integrating proprioceptive sensors, which monitor internal states like joint angles and motor currents, with exteroceptive sensors such as LiDAR and cameras that perceive external environments. This fusion enables real-time adaptive control, improved obstacle avoidance, and complex task execution by providing a comprehensive situational awareness and feedback loop. Implementing sensor fusion algorithms like Kalman filters or deep learning models optimizes data reliability and decision-making in diverse operational conditions.
Advantages and Limitations of Proprioceptive Sensors
Proprioceptive sensors provide intrinsic feedback on a robot's internal state, offering high accuracy in measuring joint angles, velocities, and forces, which is crucial for precise control and stability. Their limitations include susceptibility to drift over time and dependence on internal calibration, which can degrade performance in dynamic or unstructured environments. Despite these challenges, proprioceptive sensors excel in real-time motion estimation and autonomous adaptation without external reference points.
Challenges Associated with Exteroceptive Sensors
Exteroceptive sensors in robotics face significant challenges due to environmental variability, such as changing lighting conditions, occlusions, and noise interference, which can degrade sensor accuracy and reliability. These sensors also demand advanced data processing algorithms to interpret complex and often ambiguous external stimuli in real-time. Moreover, maintaining robustness and precision in dynamic, unstructured environments remains a critical hurdle for deploying exteroceptive sensors effectively in autonomous systems.
Future Trends in Robotic Sensor Technologies
Future trends in robotic sensor technologies emphasize the integration of advanced proprioceptive sensors, such as high-resolution tactile arrays and embedded strain gauges, to enhance internal state awareness and precise motion control. Concurrently, exteroceptive sensors like LiDAR, event-based cameras, and hyperspectral imaging are evolving to improve environmental perception and situational understanding in dynamic, unstructured settings. The convergence of these sensor modalities, powered by AI-driven sensor fusion algorithms, is expected to enable robots with superior autonomy, adaptability, and real-time decision-making capabilities.
Proprioceptive sensors vs Exteroceptive sensors Infographic