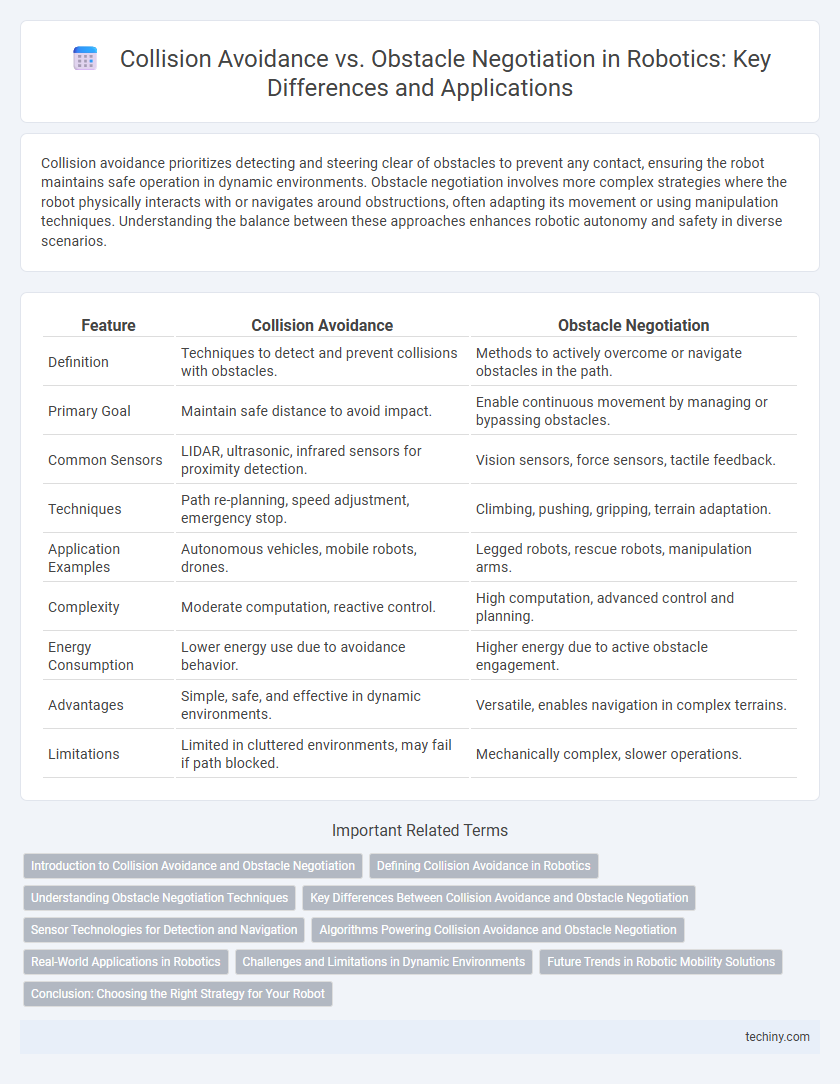
Collision avoidance prioritizes detecting and steering clear of obstacles to prevent any contact, ensuring the robot maintains safe operation in dynamic environments. Obstacle negotiation involves more complex strategies where the robot physically interacts with or navigates around obstructions, often adapting its movement or using manipulation techniques. Understanding the balance between these approaches enhances robotic autonomy and safety in diverse scenarios.
Table of Comparison
| Feature | Collision Avoidance | Obstacle Negotiation |
|---|---|---|
| Definition | Techniques to detect and prevent collisions with obstacles. | Methods to actively overcome or navigate obstacles in the path. |
| Primary Goal | Maintain safe distance to avoid impact. | Enable continuous movement by managing or bypassing obstacles. |
| Common Sensors | LIDAR, ultrasonic, infrared sensors for proximity detection. | Vision sensors, force sensors, tactile feedback. |
| Techniques | Path re-planning, speed adjustment, emergency stop. | Climbing, pushing, gripping, terrain adaptation. |
| Application Examples | Autonomous vehicles, mobile robots, drones. | Legged robots, rescue robots, manipulation arms. |
| Complexity | Moderate computation, reactive control. | High computation, advanced control and planning. |
| Energy Consumption | Lower energy use due to avoidance behavior. | Higher energy due to active obstacle engagement. |
| Advantages | Simple, safe, and effective in dynamic environments. | Versatile, enables navigation in complex terrains. |
| Limitations | Limited in cluttered environments, may fail if path blocked. | Mechanically complex, slower operations. |
Introduction to Collision Avoidance and Obstacle Negotiation
Collision avoidance in robotics involves real-time detection and prevention of unplanned contacts with objects using sensors like LiDAR and ultrasonic rangefinders. Obstacle negotiation goes further by enabling robots to plan paths and physically maneuver over or around complex barriers using advanced algorithms and locomotion capabilities. Effective integration of both ensures safe and efficient robot operation in dynamic environments.
Defining Collision Avoidance in Robotics
Collision avoidance in robotics refers to systems and algorithms designed to detect and prevent unintended contact between a robot and its environment or other objects. It relies on real-time sensor data, such as LIDAR, ultrasonic sensors, and computer vision, to map surroundings and predict potential collisions. Distinct from obstacle negotiation, collision avoidance prioritizes immediate path adjustment to maintain safety and operational integrity.
Understanding Obstacle Negotiation Techniques
Obstacle negotiation techniques in robotics involve adaptive strategies enabling robots to traverse complex environments by overcoming physical barriers through path planning, reconfiguration, or manipulation. Unlike collision avoidance, which primarily focuses on preventing contact with obstacles using sensors and real-time adjustments, obstacle negotiation requires advanced perception, locomotion skills, and decision-making algorithms to interact with and surmount obstacles. These techniques integrate sensor fusion, machine learning, and robust control systems to enhance robot mobility and operational efficiency in unstructured terrains.
Key Differences Between Collision Avoidance and Obstacle Negotiation
Collision avoidance focuses on detecting and preventing immediate impacts by recalculating a robot's path in real-time to maintain a safe distance from obstacles. Obstacle negotiation involves more complex strategies, allowing a robot to physically interact with or adapt to obstacles, such as climbing over, moving, or navigating around them while maintaining stability. The key difference lies in avoidance prioritizing prevention of contact, whereas negotiation emphasizes overcoming or managing obstacles to continue task execution.
Sensor Technologies for Detection and Navigation
Sensor technologies play a critical role in collision avoidance and obstacle negotiation within robotics by providing precise environmental perception. Lidar, ultrasonic sensors, and stereo cameras enable real-time detection of obstacles, allowing robots to dynamically adjust their path for safe and efficient navigation. Advanced sensor fusion techniques improve accuracy and reliability, facilitating seamless interaction with complex environments and enhancing autonomous decision-making.
Algorithms Powering Collision Avoidance and Obstacle Negotiation
Algorithms powering collision avoidance in robotics prioritize real-time sensor data processing to detect and rapidly respond to dynamic obstacles, using techniques like LIDAR-based mapping and deep learning for path prediction. Obstacle negotiation algorithms integrate environmental modeling with kinematic constraints, often leveraging advanced heuristic search methods and reinforcement learning to optimize traversal over complex terrains. The fusion of these algorithms enhances autonomous navigation precision and robustness in unpredictable, cluttered environments.
Real-World Applications in Robotics
Collision avoidance systems in robotics prioritize preventing contact with objects using sensors and algorithms for real-time path adjustment, vital in autonomous vehicles and drones. Obstacle negotiation entails complex maneuvers, enabling robots to traverse or manipulate obstacles, essential for search-and-rescue bots and planetary rovers. Both technologies are integral to enhancing robotic autonomy and operational efficiency in unpredictable environments.
Challenges and Limitations in Dynamic Environments
Collision avoidance systems in robotics face significant challenges in dynamic environments due to unpredictable movement patterns of obstacles and limited sensor range, which can lead to delayed or inaccurate detection. Obstacle negotiation requires advanced real-time processing and adaptive path planning to handle complex, changing terrains and interactions, but is limited by computational constraints and the robot's physical maneuverability. Both approaches struggle with rapid environmental changes, sensor noise, and the balance between safety and efficiency, impacting overall navigation reliability.
Future Trends in Robotic Mobility Solutions
Future trends in robotic mobility solutions emphasize advanced collision avoidance systems integrating AI-driven sensors to predict and prevent potential impacts in dynamic environments. Obstacle negotiation evolves through machine learning algorithms that enable real-time terrain analysis and adaptive path planning, enhancing robots' ability to traverse complex, unpredictable landscapes. The convergence of these technologies fosters autonomous robots with superior navigation capabilities, critical for applications in logistics, search and rescue, and urban mobility.
Conclusion: Choosing the Right Strategy for Your Robot
Collision avoidance prioritizes real-time detection and rapid response to prevent contact with obstacles, ideal for high-speed or unpredictable environments. Obstacle negotiation involves adaptive movements and advanced sensors to interact with or bypass complex terrain, suited for rugged or dynamic settings. Selecting the right strategy depends on the robot's operational environment, speed requirements, and the complexity of obstacles it encounters.
collision avoidance vs obstacle negotiation Infographic