Indoor SLAM relies heavily on dense feature extraction from walls, furniture, and other structural elements to accurately map confined spaces with limited GPS availability. Outdoor SLAM integrates GPS data and broader environmental features such as trees, roads, and buildings to navigate larger, dynamic environments. The choice between indoor and outdoor SLAM methods depends on sensor fusion capabilities and the specific environmental challenges that affect localization accuracy.
Table of Comparison
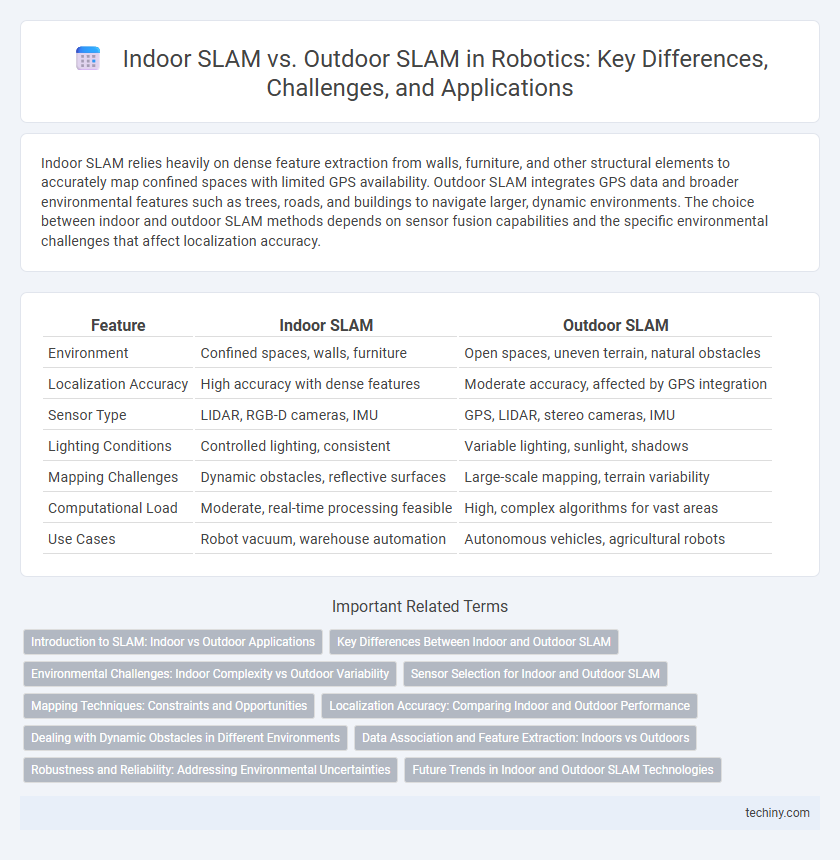
| Feature | Indoor SLAM | Outdoor SLAM |
|---|---|---|
| Environment | Confined spaces, walls, furniture | Open spaces, uneven terrain, natural obstacles |
| Localization Accuracy | High accuracy with dense features | Moderate accuracy, affected by GPS integration |
| Sensor Type | LIDAR, RGB-D cameras, IMU | GPS, LIDAR, stereo cameras, IMU |
| Lighting Conditions | Controlled lighting, consistent | Variable lighting, sunlight, shadows |
| Mapping Challenges | Dynamic obstacles, reflective surfaces | Large-scale mapping, terrain variability |
| Computational Load | Moderate, real-time processing feasible | High, complex algorithms for vast areas |
| Use Cases | Robot vacuum, warehouse automation | Autonomous vehicles, agricultural robots |
Introduction to SLAM: Indoor vs Outdoor Applications
Simultaneous Localization and Mapping (SLAM) enables robots to build maps and navigate unknown environments, differing significantly between indoor and outdoor settings. Indoor SLAM typically relies on LiDAR, RGB-D cameras, and structured environments with clear geometric features for precise localization and obstacle avoidance. Outdoor SLAM faces challenges like GPS integration, dynamic weather conditions, and large-scale mapping, often using sensor fusion techniques combining LiDAR, GPS, and visual data to ensure accuracy and robustness.
Key Differences Between Indoor and Outdoor SLAM
Indoor SLAM relies heavily on visual and LiDAR sensors to navigate confined, cluttered spaces with limited GPS signal, emphasizing precise mapping and obstacle avoidance. Outdoor SLAM incorporates GPS data alongside LiDAR and camera inputs to handle larger, dynamic environments with varying terrain and lighting conditions. Key differences include sensor dependence, environmental complexity, and the availability of external positioning systems, which influence algorithm design and real-time processing requirements.
Environmental Challenges: Indoor Complexity vs Outdoor Variability
Indoor SLAM faces challenges from dynamic obstacles, confined spaces, and repetitive structures that complicate feature extraction and localization. Outdoor SLAM must handle varying lighting conditions, weather effects, and large-scale environments with unpredictable terrain affecting sensor reliability. Robust algorithms integrate multi-modal sensor data such as LiDAR, RGB-D cameras, and GPS to navigate these contrasting environmental complexities.
Sensor Selection for Indoor and Outdoor SLAM
Indoor SLAM typically relies on LiDAR sensors and RGB-D cameras to capture detailed geometries and texture in confined environments, enabling precise localization and mapping amidst obstacles and structural complexities. Outdoor SLAM often integrates GPS data with LiDAR and stereo cameras to compensate for dynamic lighting and larger scale environments, enhancing robustness and accuracy in open spaces. Sensor fusion strategies differ significantly between indoor and outdoor SLAM implementations to optimize performance based on environmental constraints and signal availability.
Mapping Techniques: Constraints and Opportunities
Indoor SLAM leverages dense visual and LiDAR data to create high-resolution maps while managing constraints like limited GPS signals and dynamic obstacles such as humans. Outdoor SLAM benefits from GPS integration and larger operational areas but faces challenges in handling variable lighting conditions and terrain complexity. Advanced sensor fusion and adaptive algorithms optimize mapping accuracy and environmental understanding in both settings.
Localization Accuracy: Comparing Indoor and Outdoor Performance
Indoor SLAM systems achieve higher localization accuracy due to stable environmental features like walls and furniture, enabling reliable loop closure and feature extraction. Outdoor SLAM faces challenges from dynamic elements, GPS signal interference, and variable lighting, which reduce precision and consistency. Integration of sensor fusion, combining LiDAR, cameras, and GPS, enhances outdoor localization but still often lags behind the indoor SLAM accuracy benchmarks.
Dealing with Dynamic Obstacles in Different Environments
Indoor SLAM systems commonly utilize LiDAR and RGB-D sensors to accurately detect and map dynamic obstacles such as moving people and furniture shifts in confined spaces. Outdoor SLAM leverages GPS integration alongside stereo vision and radar to handle dynamic elements like vehicles and pedestrians in sprawling, variable terrains. Effective dynamic obstacle management relies on real-time sensor fusion and adaptive algorithms tailored for the distinct spatial and environmental challenges of indoor versus outdoor settings.
Data Association and Feature Extraction: Indoors vs Outdoors
Indoor SLAM relies heavily on identifying and associating distinct artificial features like walls, furniture edges, and corners, benefiting from structured environments with stable landmarks for robust data association. Outdoor SLAM deals with natural and dynamic features such as trees, buildings, and landmarks, requiring more sophisticated feature extraction algorithms to handle variability in lighting and weather conditions. Data association indoors often exploits geometric regularities and controlled lighting, while outdoor environments demand adaptive methods to manage feature occlusions and environmental changes.
Robustness and Reliability: Addressing Environmental Uncertainties
Indoor SLAM systems demonstrate higher robustness in controlled environments where sensor noise and dynamic obstacles are limited, allowing for more reliable mapping and localization. Outdoor SLAM faces greater challenges due to variable lighting, weather conditions, and larger-scale environments, requiring advanced algorithms to maintain accuracy. Techniques such as sensor fusion and adaptive filtering enhance the reliability of SLAM in unpredictable outdoor scenarios.
Future Trends in Indoor and Outdoor SLAM Technologies
Future trends in Indoor and Outdoor SLAM technologies emphasize enhanced sensor fusion, combining LiDAR, RGB-D cameras, and IMU data to improve accuracy and robustness in diverse environments. Advances in deep learning models enable real-time semantic mapping, allowing robots to better understand and interact with dynamic indoor and outdoor spaces. Edge computing integration reduces latency and power consumption, facilitating more efficient autonomous navigation and environment perception.
Indoor SLAM vs Outdoor SLAM Infographic