Motion planning involves computing feasible paths or trajectories for a robot to move from one point to another while avoiding obstacles, emphasizing geometric and kinematic constraints. Task planning focuses on the sequence of high-level actions or operations a robot must perform to achieve a specific goal, integrating symbolic reasoning and decision-making. Combining motion planning and task planning enables robots to execute complex tasks efficiently by aligning physical movements with strategic objectives.
Table of Comparison
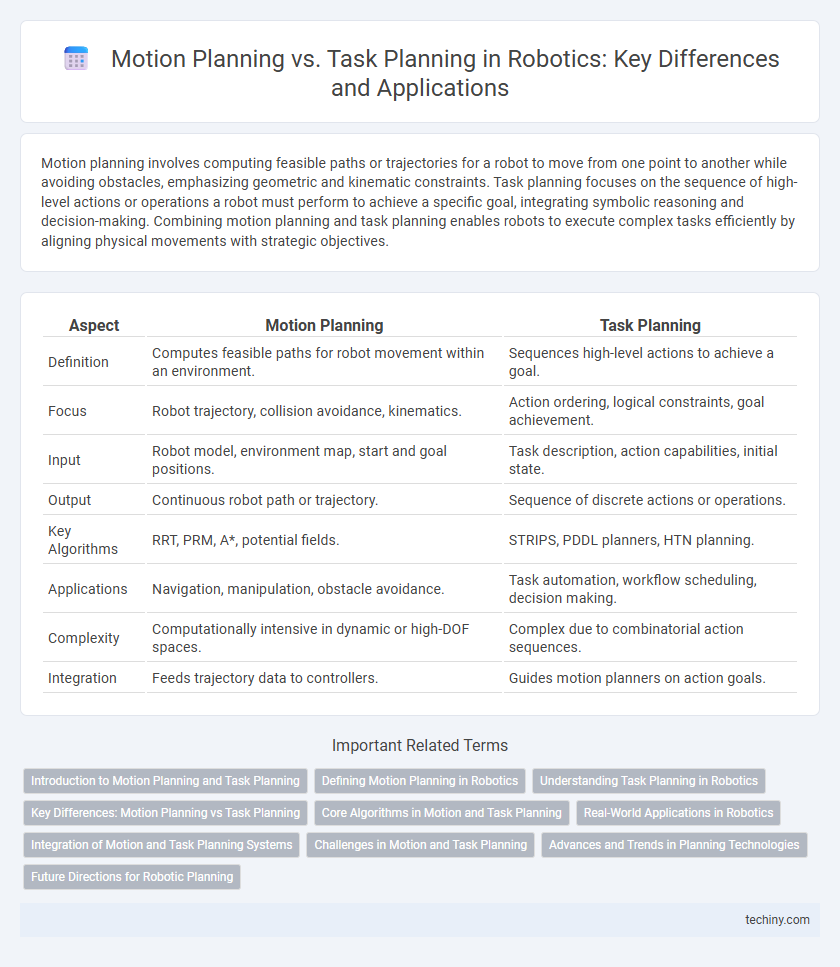
| Aspect | Motion Planning | Task Planning |
|---|---|---|
| Definition | Computes feasible paths for robot movement within an environment. | Sequences high-level actions to achieve a goal. |
| Focus | Robot trajectory, collision avoidance, kinematics. | Action ordering, logical constraints, goal achievement. |
| Input | Robot model, environment map, start and goal positions. | Task description, action capabilities, initial state. |
| Output | Continuous robot path or trajectory. | Sequence of discrete actions or operations. |
| Key Algorithms | RRT, PRM, A*, potential fields. | STRIPS, PDDL planners, HTN planning. |
| Applications | Navigation, manipulation, obstacle avoidance. | Task automation, workflow scheduling, decision making. |
| Complexity | Computationally intensive in dynamic or high-DOF spaces. | Complex due to combinatorial action sequences. |
| Integration | Feeds trajectory data to controllers. | Guides motion planners on action goals. |
Introduction to Motion Planning and Task Planning
Motion planning in robotics involves calculating a feasible path for a robot to move from a start position to a target location while avoiding obstacles and adhering to kinematic constraints. Task planning focuses on generating a sequence of high-level actions or operations to accomplish specific goals, such as assembling parts or navigating environments. Integrating motion planning with task planning enhances robotic autonomy by coordinating precise movements with strategic decision-making to perform complex tasks efficiently.
Defining Motion Planning in Robotics
Motion planning in robotics involves calculating a feasible path for a robot to move from an initial position to a target location while avoiding obstacles and adhering to kinematic and dynamic constraints. It integrates algorithms such as Rapidly-exploring Random Trees (RRT) and Probabilistic Roadmaps (PRM) to ensure collision-free navigation within complex environments. Precise motion planning is critical for robotic manipulation, autonomous vehicles, and robotic arms operating in dynamic or cluttered spaces.
Understanding Task Planning in Robotics
Task planning in robotics involves creating high-level sequences of actions that enable robots to achieve complex goals by considering the environment, objectives, and constraints. It focuses on determining the order and conditions of tasks, integrating sensory input and decision-making processes to adapt to dynamic scenarios. By optimizing task execution strategies, task planning enhances robot autonomy and efficiency in performing multifaceted operations.
Key Differences: Motion Planning vs Task Planning
Motion planning in robotics focuses on computing feasible trajectories for robot movement considering kinematic and dynamic constraints, ensuring collision-free paths within the robot's environment. Task planning, on the other hand, involves sequencing high-level actions or goals, deciding what tasks the robot should perform to achieve complex objectives. Key differences lie in granularity and purpose: motion planning deals with geometric path optimization and execution, while task planning addresses logical order and decision-making for task completion.
Core Algorithms in Motion and Task Planning
Core algorithms in motion planning primarily involve sampling-based methods like Rapidly-exploring Random Trees (RRT) and Probabilistic Roadmaps (PRM) to efficiently navigate high-dimensional configuration spaces for obstacle avoidance. Task planning relies on symbolic reasoning techniques such as Hierarchical Task Networks (HTN) and Planning Domain Definition Language (PDDL) based planners to generate sequences of discrete actions that achieve specified goals. Both domains integrate optimization and search algorithms, but motion planning emphasizes geometric feasibility while task planning focuses on logical action sequencing.
Real-World Applications in Robotics
Motion planning in robotics involves calculating feasible trajectories for robot movement within an environment, ensuring obstacle avoidance and efficient path execution. Task planning focuses on sequencing and allocating higher-level actions to achieve desired goals, such as assembling parts or performing inspections. Real-world applications integrate both approaches, enabling autonomous vehicles to navigate complex terrains while executing delivery tasks or industrial robots to optimize workflows in manufacturing settings.
Integration of Motion and Task Planning Systems
Integrating motion and task planning systems enhances robotic efficiency by combining high-level decision-making with precise path execution, enabling robots to perform complex tasks in dynamic environments. Motion planning algorithms, such as Rapidly-exploring Random Trees (RRT) or Probabilistic Roadmaps (PRM), generate collision-free trajectories, while task planners organize sequences of actions to achieve overarching goals. Effective integration leverages real-time feedback and adaptive planning, resulting in optimized task completion and increased autonomy in robotic systems.
Challenges in Motion and Task Planning
Challenges in motion planning include navigating complex, dynamic environments while ensuring real-time obstacle avoidance and path optimization. Task planning struggles with sequencing high-level actions effectively to achieve goals within uncertain, changing operational contexts. Integrating both demands addressing computational complexity and maintaining robustness across diverse robotics applications.
Advances and Trends in Planning Technologies
Motion planning advances focus on real-time, high-dimensional path optimization using algorithms like RRT* and Deep Reinforcement Learning, enabling robots to navigate complex dynamic environments efficiently. Task planning trends emphasize integrating symbolic reasoning with machine learning to handle uncertain and unstructured scenarios, improving decision-making for multi-step actions. Hybrid approaches combining motion and task planning increasingly leverage AI-driven frameworks to enhance overall robot autonomy and adaptability in diverse applications.
Future Directions for Robotic Planning
Future directions for robotic planning emphasize the integration of motion planning and task planning to enhance autonomous decision-making in complex environments. Leveraging machine learning and probabilistic models can improve adaptability and real-time response in robotic systems. Advances in multi-agent coordination and human-robot interaction will drive the development of more efficient and collaborative robotic planning frameworks.
Motion planning vs Task planning Infographic