Direct drive actuators provide higher precision and faster response by eliminating mechanical backlash and reducing friction compared to gear-driven actuators. Gear-driven actuators offer higher torque output and mechanical advantage but suffer from increased maintenance requirements due to wear and backlash over time. The choice between direct drive and gear-driven actuators depends on the specific demands for speed, accuracy, torque, and system complexity in robotic applications.
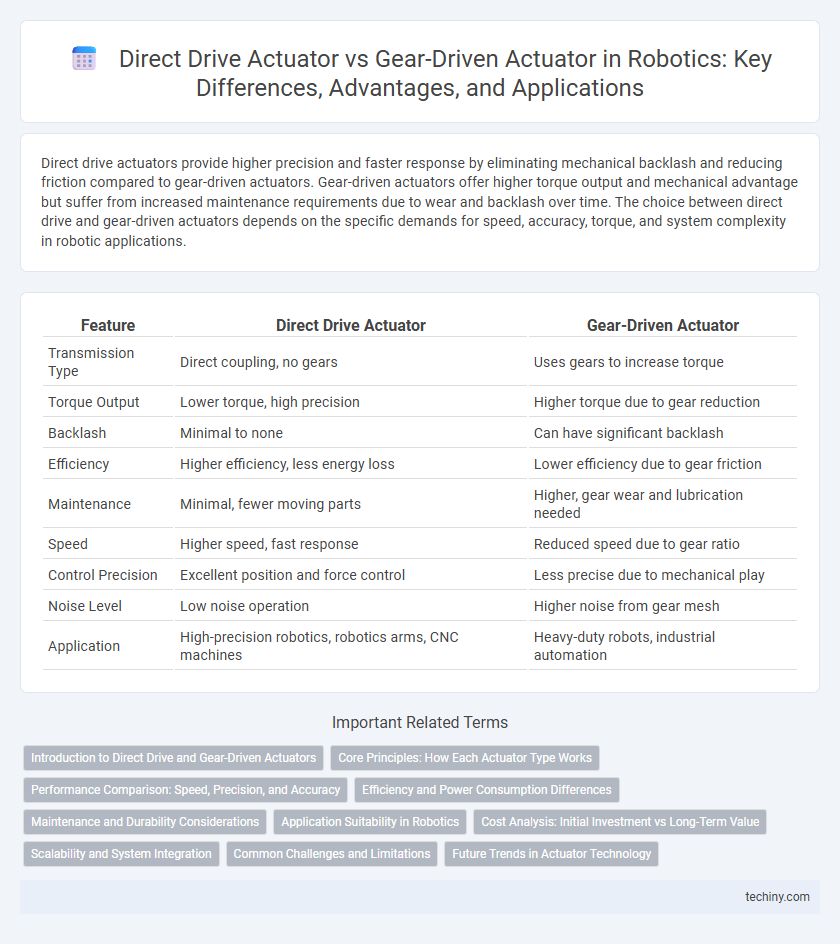
Table of Comparison
| Feature | Direct Drive Actuator | Gear-Driven Actuator |
|---|---|---|
| Transmission Type | Direct coupling, no gears | Uses gears to increase torque |
| Torque Output | Lower torque, high precision | Higher torque due to gear reduction |
| Backlash | Minimal to none | Can have significant backlash |
| Efficiency | Higher efficiency, less energy loss | Lower efficiency due to gear friction |
| Maintenance | Minimal, fewer moving parts | Higher, gear wear and lubrication needed |
| Speed | Higher speed, fast response | Reduced speed due to gear ratio |
| Control Precision | Excellent position and force control | Less precise due to mechanical play |
| Noise Level | Low noise operation | Higher noise from gear mesh |
| Application | High-precision robotics, robotics arms, CNC machines | Heavy-duty robots, industrial automation |
Introduction to Direct Drive and Gear-Driven Actuators
Direct drive actuators eliminate mechanical transmission components by directly coupling the motor to the load, resulting in high precision, reduced backlash, and increased responsiveness in robotics applications. Gear-driven actuators utilize gear mechanisms to amplify torque and adjust speed, offering cost-effective solutions but often introducing backlash and reduced control accuracy. Understanding the fundamental differences between these actuators is crucial for optimizing robotic system performance and selecting appropriate motion control strategies.
Core Principles: How Each Actuator Type Works
Direct drive actuators transmit torque directly from the motor to the load, eliminating intermediate mechanical components and resulting in higher precision, reduced backlash, and improved efficiency. Gear-driven actuators utilize a system of gears to multiply torque and reduce speed, enabling higher force output but introducing potential backlash and mechanical complexity. Understanding the core mechanical interactions in each actuator type is essential for selecting the appropriate solution based on application requirements like precision, force, and response time.
Performance Comparison: Speed, Precision, and Accuracy
Direct drive actuators offer superior speed, precision, and accuracy compared to gear-driven actuators due to the elimination of backlash and mechanical compliance inherent in gear systems. The absence of gears results in faster response times and higher positional accuracy, making direct drive actuators ideal for applications requiring high dynamic performance. Gear-driven actuators, while often more cost-effective, typically exhibit reduced precision and slower speeds due to gear friction and backlash effects, limiting their effectiveness in high-precision robotics tasks.
Efficiency and Power Consumption Differences
Direct drive actuators exhibit higher efficiency and lower power consumption by eliminating mechanical losses associated with gears, resulting in smoother motion and faster response times. Gear-driven actuators suffer from frictional losses and wear, which decrease overall efficiency and increase energy usage during operation. Consequently, direct drive systems are preferred in applications demanding precise control and energy conservation.
Maintenance and Durability Considerations
Direct drive actuators require minimal maintenance due to fewer moving parts and the absence of gears, which reduces wear and tear, enhancing overall durability. Gear-driven actuators involve regular lubrication, inspection, and potential replacement of gears, increasing maintenance frequency and costs. The simplicity of direct drive systems results in longer service life and consistent performance in demanding robotic applications.
Application Suitability in Robotics
Direct drive actuators in robotics offer high precision and speed with minimal backlash, making them ideal for applications requiring fine motion control such as robotic arms in assembly lines and surgical robots. Gear-driven actuators provide higher torque and mechanical advantage, suitable for heavy-duty tasks like industrial robots handling large payloads and material handling systems. Selecting between direct drive and gear-driven actuators depends on the specific demands of load capacity, precision, and response time required by the robotic application.
Cost Analysis: Initial Investment vs Long-Term Value
Direct drive actuators typically have a higher initial investment due to advanced motor technology and precision components but offer lower long-term maintenance costs by eliminating mechanical transmission elements like gears and lubricants. Gear-driven actuators present a lower upfront cost but incur ongoing expenses from gear wear, lubrication needs, and potential backlash compensation, impacting overall system reliability and efficiency. Evaluating total cost of ownership reveals that direct drive actuators provide superior long-term value for applications demanding high precision and minimal downtime despite their elevated initial expenditure.
Scalability and System Integration
Direct drive actuators offer superior scalability due to their simpler design with fewer moving parts, enabling easy adaptation to various robotic applications and load requirements. Gear-driven actuators provide modular system integration by allowing the combination of different gear ratios to customize torque and speed, facilitating optimized performance in complex robotic assemblies. Scalability in direct drive systems often translates to lower maintenance and enhanced precision, while gear-driven systems excel in compact integration and mechanical advantage.
Common Challenges and Limitations
Direct drive actuators offer high precision and reduced backlash but face challenges in delivering high torque at low speeds, limiting their application in heavy-load robotics. Gear-driven actuators provide greater torque amplification and compactness but suffer from issues like gear backlash, increased maintenance, and reduced efficiency due to friction losses. Both actuator types encounter limitations in balancing torque, speed, control accuracy, and durability, necessitating careful selection based on specific robotic application requirements.
Future Trends in Actuator Technology
Direct drive actuators are gaining prominence in robotics due to their high precision, reduced backlash, and simplified mechanical design, enabling faster and more responsive systems. Future trends emphasize advancements in smart materials and integrated sensor technology within direct drive systems to enhance adaptability and energy efficiency. Gear-driven actuators, while still prevalent for applications requiring high torque, are evolving with improved gear materials and lubrication technologies to reduce maintenance and increase durability.
Direct drive actuator vs Gear-driven actuator Infographic