Gait generation involves creating rhythmic, repetitive movement patterns tailored for efficient and stable locomotion in robots, emphasizing real-time adaptability and robustness. Trajectory optimization focuses on computing precise, energy-efficient motion paths by solving complex mathematical problems to meet specific performance criteria. While gait generation excels in dynamic environments with continuous feedback, trajectory optimization delivers optimal solutions for well-defined tasks requiring accuracy and smoothness.
Table of Comparison
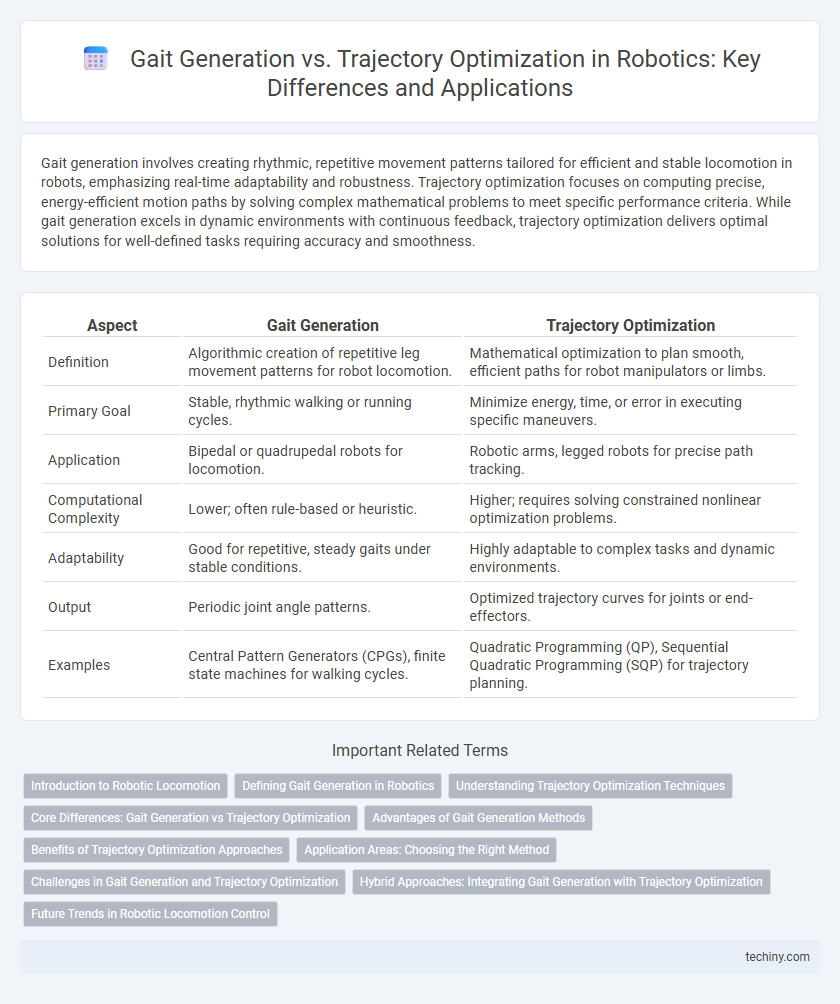
| Aspect | Gait Generation | Trajectory Optimization |
|---|---|---|
| Definition | Algorithmic creation of repetitive leg movement patterns for robot locomotion. | Mathematical optimization to plan smooth, efficient paths for robot manipulators or limbs. |
| Primary Goal | Stable, rhythmic walking or running cycles. | Minimize energy, time, or error in executing specific maneuvers. |
| Application | Bipedal or quadrupedal robots for locomotion. | Robotic arms, legged robots for precise path tracking. |
| Computational Complexity | Lower; often rule-based or heuristic. | Higher; requires solving constrained nonlinear optimization problems. |
| Adaptability | Good for repetitive, steady gaits under stable conditions. | Highly adaptable to complex tasks and dynamic environments. |
| Output | Periodic joint angle patterns. | Optimized trajectory curves for joints or end-effectors. |
| Examples | Central Pattern Generators (CPGs), finite state machines for walking cycles. | Quadratic Programming (QP), Sequential Quadratic Programming (SQP) for trajectory planning. |
Introduction to Robotic Locomotion
Gait generation in robotic locomotion involves designing repetitive patterns of limb movements to achieve stable and efficient walking or running. Trajectory optimization uses mathematical algorithms to compute optimal paths and control inputs that minimize energy consumption or maximize stability during movement. Both approaches are crucial for enabling autonomous robots to adapt to complex terrains and dynamic environments.
Defining Gait Generation in Robotics
Gait generation in robotics refers to the algorithmic process of designing repetitive movement patterns that enable robots to walk or move efficiently across various terrains. It emphasizes producing stable, cyclic motions tailored for legs or limbs, often leveraging central pattern generators or simplified control models. This contrasts with trajectory optimization, which seeks to compute precise, energy-efficient paths for complex, dynamic tasks.
Understanding Trajectory Optimization Techniques
Trajectory optimization techniques in robotics involve computing the most efficient path for a robot's movement by minimizing cost functions related to energy, time, or stability. These methods leverage numerical algorithms such as direct collocation and shooting methods to solve complex nonlinear dynamics and constraints, enabling precise control over robot motion. Gait generation often relies on simplified models, while trajectory optimization provides a comprehensive framework to handle multi-dimensional constraints for advanced robotic locomotion.
Core Differences: Gait Generation vs Trajectory Optimization
Gait generation focuses on creating repetitive, cyclic motion patterns for legged robots, emphasizing stability and energy efficiency, whereas trajectory optimization involves computing precise, time-indexed paths for robot limbs to achieve specific tasks with constraints like obstacle avoidance and dynamic feasibility. Gait generation typically uses bio-inspired or heuristic models to define locomotion sequences, while trajectory optimization employs mathematical programming and physics-based simulations to minimize cost functions such as energy consumption, time, or control effort. The core difference lies in gait generation providing generalized movement templates for continuous motion, contrasting with trajectory optimization's detailed, task-specific refinement of motion paths.
Advantages of Gait Generation Methods
Gait generation methods offer real-time adaptability and computational efficiency, enabling robots to respond quickly to dynamic environments without heavy processing demands. These methods leverage predefined motion patterns that simplify control strategies and enhance stability, particularly in legged locomotion. Unlike trajectory optimization, gait generation often requires less modeling complexity, facilitating robust performance in uncertain or changing terrains.
Benefits of Trajectory Optimization Approaches
Trajectory optimization methods enable robots to generate smooth, energy-efficient motions by considering system dynamics and environmental constraints simultaneously. These approaches improve adaptability in complex tasks, allowing real-time adjustments and enhanced stability compared to traditional gait generation techniques. Optimized trajectories reduce wear on mechanical components and increase overall performance in legged robotic locomotion.
Application Areas: Choosing the Right Method
Gait generation excels in applications involving legged robots for dynamic stability and adaptability in uneven terrains, making it ideal for humanoid and quadruped robots. Trajectory optimization suits precise manipulation tasks and autonomous vehicles, where smooth, collision-free path planning and energy efficiency are critical. Selecting the right method depends on the robot's operational environment and mission-specific requirements such as real-time response versus computational complexity.
Challenges in Gait Generation and Trajectory Optimization
Challenges in gait generation involve managing high-dimensional control spaces and ensuring stability during dynamic locomotion, which demand real-time adaptability to varied terrains and disturbances. Trajectory optimization faces difficulties in balancing computational efficiency with solution accuracy while handling nonlinear dynamics and constraints inherent to robotic systems. Both processes require robust algorithms capable of integrating sensory feedback and coping with uncertainties to achieve smooth, energy-efficient, and stable robot movements.
Hybrid Approaches: Integrating Gait Generation with Trajectory Optimization
Hybrid approaches in robotics combine gait generation methods with trajectory optimization to enhance robot locomotion efficiency and adaptability. By integrating predefined gait patterns with real-time trajectory adjustments, these methods achieve smoother transitions and improved energy consumption. This fusion enables robots to better handle complex terrains and dynamic environments, advancing autonomous mobility.
Future Trends in Robotic Locomotion Control
Gait generation techniques emphasize pattern-based control, enabling adaptable and energy-efficient movement in robots across varied terrains. Trajectory optimization leverages advanced algorithms and real-time feedback to refine motion paths, improving precision and stability in complex environments. Emerging trends integrate machine learning with these methods, fostering autonomous adaptation and enhanced responsiveness in robotic locomotion control systems.
Gait generation vs Trajectory optimization Infographic