Greybox models in robotics combine theoretical knowledge of system dynamics with data-driven components, enabling more accurate and interpretable predictions compared to purely empirical blackbox models. While blackbox models rely solely on data input-output mapping without insight into internal mechanisms, greybox models incorporate physical laws and constraints to improve robustness and generalization. This integration allows greybox approaches to enhance control performance and fault detection in complex robotic systems where partial system knowledge is available.
Table of Comparison
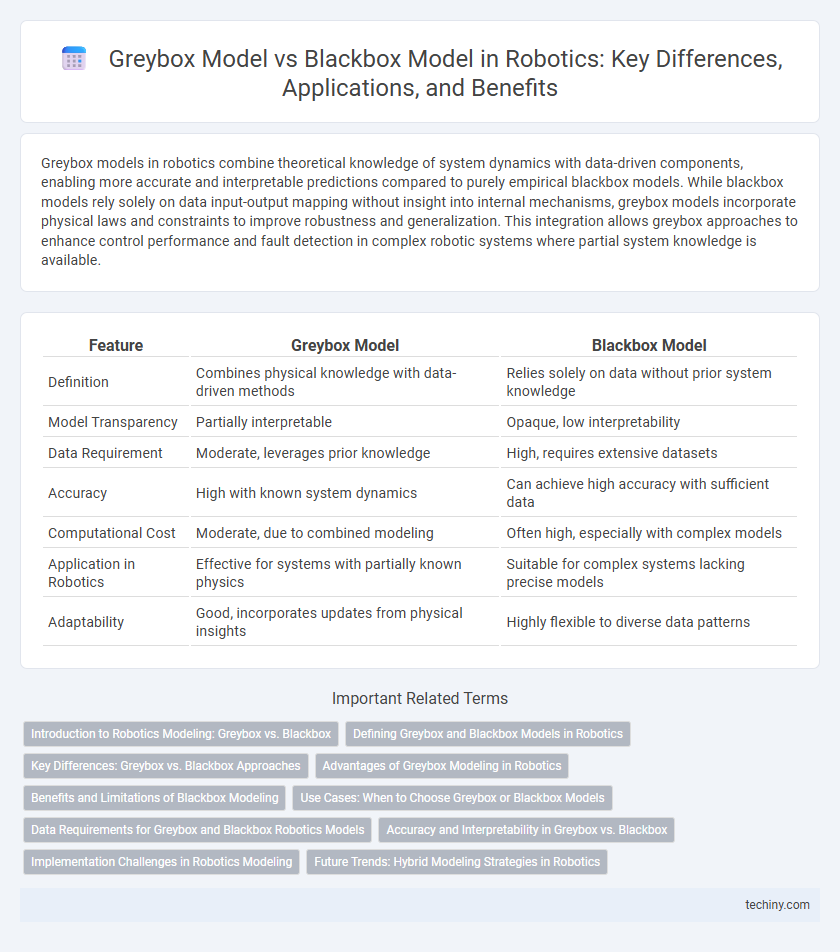
| Feature | Greybox Model | Blackbox Model |
|---|---|---|
| Definition | Combines physical knowledge with data-driven methods | Relies solely on data without prior system knowledge |
| Model Transparency | Partially interpretable | Opaque, low interpretability |
| Data Requirement | Moderate, leverages prior knowledge | High, requires extensive datasets |
| Accuracy | High with known system dynamics | Can achieve high accuracy with sufficient data |
| Computational Cost | Moderate, due to combined modeling | Often high, especially with complex models |
| Application in Robotics | Effective for systems with partially known physics | Suitable for complex systems lacking precise models |
| Adaptability | Good, incorporates updates from physical insights | Highly flexible to diverse data patterns |
Introduction to Robotics Modeling: Greybox vs. Blackbox
Greybox models in robotics combine physical knowledge with data-driven techniques, enabling more accurate system representation and easier interpretability compared to purely data-dependent blackbox models. Blackbox models rely solely on input-output data without internal structure understanding, often requiring large datasets and computational power but providing flexibility in modeling complex nonlinear robotic systems. Employing greybox models improves robotic control and prediction accuracy by integrating domain expertise with machine learning, making them essential for advanced robotics applications.
Defining Greybox and Blackbox Models in Robotics
Greybox models in robotics integrate prior knowledge of system dynamics with data-driven components, enhancing interpretability and accuracy in representing robot behavior. Blackbox models rely solely on input-output data without explicit knowledge of the internal system, often using machine learning algorithms like neural networks for control and prediction. The combination of physical insight and empirical data in greybox models offers improved performance in complex robotic tasks compared to purely data-driven blackbox approaches.
Key Differences: Greybox vs. Blackbox Approaches
Greybox models in robotics integrate partial knowledge of the system's physical principles with data-driven methods, enabling interpretable predictions and improved generalization under varying conditions. Blackbox models rely solely on data without explicit system understanding, often requiring extensive training datasets but excelling in capturing complex nonlinear behaviors. The key differences lie in transparency, reliance on prior system knowledge, and adaptability to new scenarios, making greybox models preferable for systems where physics-based insights enhance model robustness.
Advantages of Greybox Modeling in Robotics
Greybox modeling in robotics combines physical laws with data-driven techniques, enabling more accurate system identification and prediction compared to blackbox models. This approach leverages known system dynamics to enhance model interpretability and reduces the amount of training data required, improving efficiency in controller design and adaptive behaviors. Greybox models support fault diagnosis and real-time adjustment by integrating sensor information with existing robotic system knowledge.
Benefits and Limitations of Blackbox Modeling
Blackbox modeling in robotics offers the benefit of capturing complex system behaviors without requiring detailed knowledge of the internal mechanisms, enabling efficient predictions based on input-output data. However, its limitations include a lack of interpretability and reduced generalizability outside training conditions, which can hinder model reliability in dynamic or unforeseen environments. Despite these challenges, blackbox models are valuable for tasks where system dynamics are too intricate or poorly understood for traditional analytical approaches.
Use Cases: When to Choose Greybox or Blackbox Models
Greybox models excel in robotics applications requiring interpretability and domain knowledge integration, such as system diagnostics and control algorithm development, where some physical understanding exists. Blackbox models are preferred in complex robotic perception tasks, like vision or sensor data processing, where underlying system dynamics are unknown or highly nonlinear. Selecting between greybox and blackbox models depends on balancing transparency needs, computational resources, and the availability of prior system knowledge.
Data Requirements for Greybox and Blackbox Robotics Models
Greybox robotics models require significantly less data compared to blackbox models due to their reliance on physical laws and domain knowledge integrated with data-driven components. Blackbox models demand extensive labeled datasets to train complex architectures like deep neural networks, often needing millions of samples for accurate behavior prediction. Leveraging greybox models reduces data requirements and improves model interpretability, crucial for robotics applications where data collection is costly and system transparency is essential.
Accuracy and Interpretability in Greybox vs. Blackbox
Greybox models in robotics combine physical knowledge with data-driven learning, providing higher interpretability and moderate accuracy by leveraging system dynamics and empirical data. Blackbox models rely solely on data, often achieving superior accuracy in complex tasks but lack transparency, making it difficult to understand decision processes. The trade-off between greybox and blackbox models centers on balancing accurate predictive performance with the need for model explainability and insight into robotic system behavior.
Implementation Challenges in Robotics Modeling
Greybox models in robotics blend physical principles with data-driven methods, offering interpretability but requiring precise parameter tuning and accurate system knowledge, which can be difficult to obtain. Blackbox models rely solely on data, enabling flexible adaptation to complex robotic behaviors but necessitating large datasets and extensive training, posing challenges in real-time implementation and generalization. Both approaches face trade-offs in computational efficiency, scalability, and robustness, complicating their deployment in dynamic and uncertain robotic environments.
Future Trends: Hybrid Modeling Strategies in Robotics
Hybrid modeling strategies in robotics combine the interpretability of greybox models with the flexibility of blackbox models, enabling more accurate and adaptive robot behavior predictions. These approaches leverage physics-based knowledge alongside machine learning to improve system identification, fault detection, and control in complex and dynamic environments. Future trends emphasize real-time hybrid frameworks that integrate sensor data and domain expertise for enhanced autonomy and robustness in robotic systems.
greybox model vs blackbox model Infographic