Actuator saturation limits the maximum output of a robotic actuator, preventing commands from exceeding physical or safety constraints, which can cause performance degradation and control instability. Deadband defines a range around the actuator's neutral position where small input signals do not produce any movement, reducing noise sensitivity and wear but potentially causing a delay or lack of responsiveness. Balancing actuator saturation and deadband is essential to optimize robotic precision, energy efficiency, and reliable operation in dynamic environments.
Table of Comparison
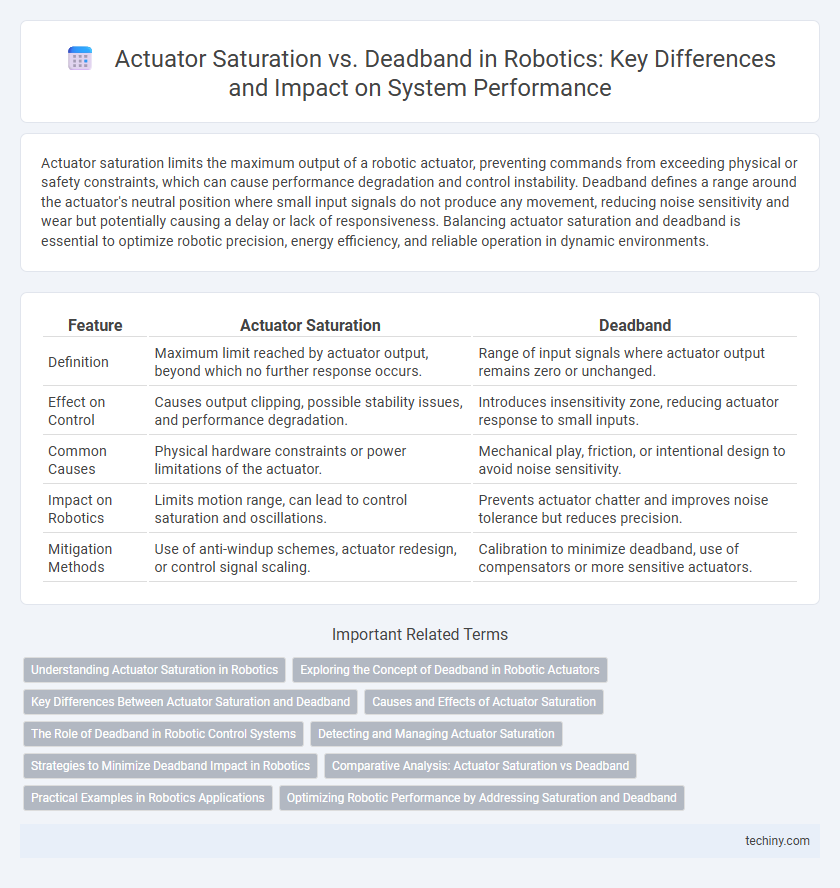
| Feature | Actuator Saturation | Deadband |
|---|---|---|
| Definition | Maximum limit reached by actuator output, beyond which no further response occurs. | Range of input signals where actuator output remains zero or unchanged. |
| Effect on Control | Causes output clipping, possible stability issues, and performance degradation. | Introduces insensitivity zone, reducing actuator response to small inputs. |
| Common Causes | Physical hardware constraints or power limitations of the actuator. | Mechanical play, friction, or intentional design to avoid noise sensitivity. |
| Impact on Robotics | Limits motion range, can lead to control saturation and oscillations. | Prevents actuator chatter and improves noise tolerance but reduces precision. |
| Mitigation Methods | Use of anti-windup schemes, actuator redesign, or control signal scaling. | Calibration to minimize deadband, use of compensators or more sensitive actuators. |
Understanding Actuator Saturation in Robotics
Actuator saturation in robotics occurs when a motor or hydraulic system reaches its maximum output limit, preventing further increase in commanded force or torque. This phenomenon causes non-linear behavior, leading to reduced control accuracy and potential instability in robotic movements. Understanding actuator saturation is critical for designing control algorithms that compensate for these limits and ensure precise, safe operation.
Exploring the Concept of Deadband in Robotic Actuators
Deadband in robotic actuators refers to a specific range of input signals where no output movement occurs, effectively creating a zone of insensitivity that prevents minor fluctuations from triggering actuator response. This concept is critical for improving control precision by reducing unintended micro-movements and minimizing wear on mechanical components. Unlike actuator saturation, which limits maximum actuator output, deadband focuses on enhancing stability and smooth operation within low input thresholds.
Key Differences Between Actuator Saturation and Deadband
Actuator saturation occurs when the input signal demands a response beyond the actuator's maximum capacity, causing output to plateau regardless of further input increase. Deadband refers to a range of input signals within which the actuator produces no output response, effectively ignoring small input variations to prevent unnecessary movement or oscillations. The key difference lies in saturation limiting the maximum output, whereas deadband creates a non-responsive zone around zero input, optimizing control precision and stability in robotic systems.
Causes and Effects of Actuator Saturation
Actuator saturation occurs when an actuator receives a command beyond its maximum capacity, causing it to reach a physical or electrical limit and cease responding proportionally to input signals. This saturation often results from excessive control efforts, insufficient power supply, or mechanical constraints, leading to performance degradation such as reduced precision, increased wear, and potential system instability. Unlike deadband, which creates a range of insensitivity around a neutral position, saturation limits the actuator's full range of motion, significantly impacting robotic manipulators' accuracy and control fidelity.
The Role of Deadband in Robotic Control Systems
Deadband in robotic control systems defines a range of input signals within which the actuator remains inactive, preventing minor fluctuations from causing unnecessary movement or wear. This controlled insensitivity enhances system stability and precision by filtering out noise and small disturbances without saturating the actuator. Properly calibrated deadbands minimize energy consumption and improve the longevity of robotic actuators by avoiding constant minor adjustments that lead to premature saturation.
Detecting and Managing Actuator Saturation
Actuator saturation occurs when a control signal exceeds the maximum capacity of the actuator, leading to limited motion response and potential control instability. Detecting saturation involves monitoring actuator outputs against predefined thresholds, while managing it requires implementing techniques such as anti-windup control and adaptive gain tuning to maintain system stability. Effective handling of actuator saturation ensures precise robotic motion and prevents performance degradation in automated systems.
Strategies to Minimize Deadband Impact in Robotics
Minimizing deadband impact in robotics involves using high-resolution sensors and fine-tuning control algorithms to improve actuator responsiveness and precision. Implementing adaptive control techniques and incorporating feedback linearization helps reduce the effect of deadband while preventing actuator saturation. Employing predictive models allows for compensation of nonlinearities, enhancing overall system performance in robotic motion control.
Comparative Analysis: Actuator Saturation vs Deadband
Actuator saturation occurs when a control signal exceeds the maximum output capacity, causing the actuator to produce limited or no additional response, whereas deadband refers to a range of input signals that elicit no actuator movement, effectively creating a zone of insensitivity. In robotics, saturation can lead to performance degradation and instability during high-demand tasks, while deadband introduces a threshold that reduces unnecessary actuator wear and noise by filtering out small, insignificant input variations. Comparative analysis highlights that managing saturation is critical for ensuring actuator safety and responsiveness, whereas optimizing deadband improves control precision and energy efficiency in robotic systems.
Practical Examples in Robotics Applications
In robotics, actuator saturation occurs when a motor or servo reaches its maximum output limit, causing a plateau in response despite increased input commands, which can lead to loss of control precision in robotic arms handling heavy payloads. Deadband refers to a range of input signals that produce no movement due to mechanical or electrical tolerances, commonly observed in servo steering systems where small input variations do not result in actuator motion, preventing jitter and reducing wear. Practical examples include industrial robots experiencing actuator saturation during high-torque welding tasks and mobile robots exhibiting deadband in wheel motors for stable navigation on uneven terrain.
Optimizing Robotic Performance by Addressing Saturation and Deadband
Actuator saturation limits the maximum output force or torque, causing nonlinear behavior that degrades robotic precision and responsiveness. Deadband introduces a range of input values where the actuator output remains zero, leading to control insensitivity and potential oscillations. Optimizing robotic performance requires carefully tuning control algorithms to minimize the effects of both saturation and deadband, ensuring smooth and accurate actuator responses.
Actuator saturation vs Deadband Infographic