Manipulator arms provide precise control and dexterity for tasks requiring fine manipulation and complex movements within a fixed workspace. Mobile bases enhance a robot's operational range by enabling navigation and positioning across varied environments, increasing versatility in field applications. Combining manipulators with mobile bases allows robots to perform intricate tasks while moving between locations, optimizing functionality in dynamic settings.
Table of Comparison
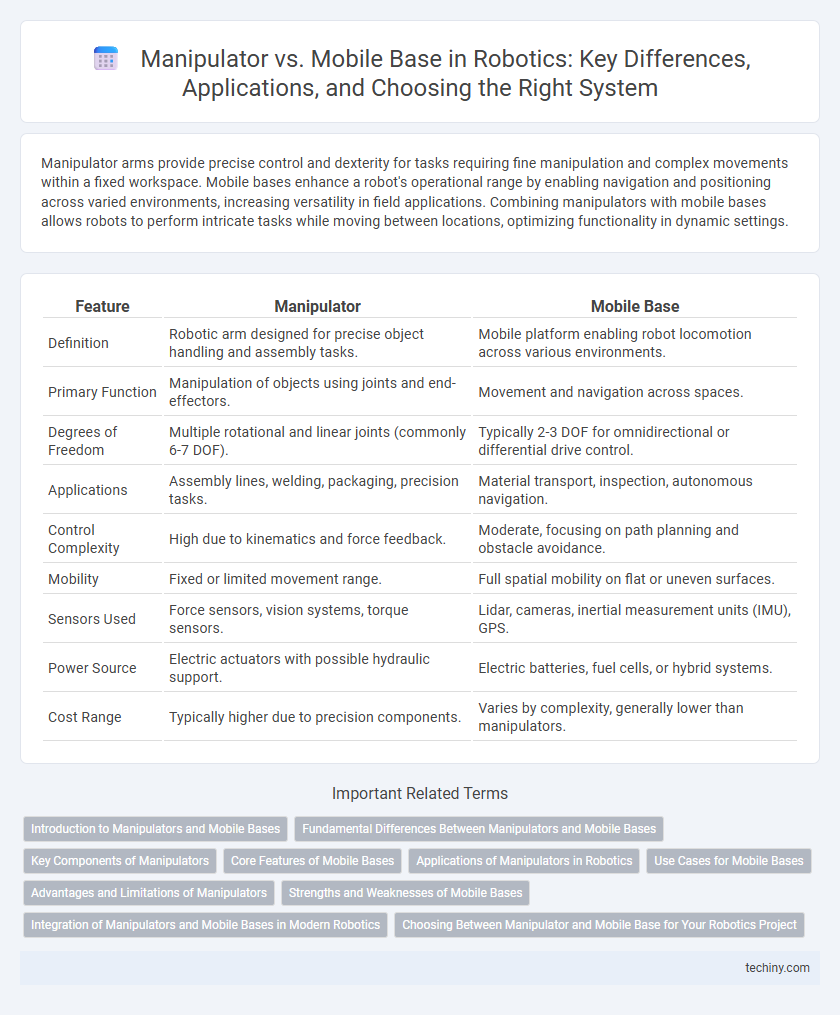
| Feature | Manipulator | Mobile Base |
|---|---|---|
| Definition | Robotic arm designed for precise object handling and assembly tasks. | Mobile platform enabling robot locomotion across various environments. |
| Primary Function | Manipulation of objects using joints and end-effectors. | Movement and navigation across spaces. |
| Degrees of Freedom | Multiple rotational and linear joints (commonly 6-7 DOF). | Typically 2-3 DOF for omnidirectional or differential drive control. |
| Applications | Assembly lines, welding, packaging, precision tasks. | Material transport, inspection, autonomous navigation. |
| Control Complexity | High due to kinematics and force feedback. | Moderate, focusing on path planning and obstacle avoidance. |
| Mobility | Fixed or limited movement range. | Full spatial mobility on flat or uneven surfaces. |
| Sensors Used | Force sensors, vision systems, torque sensors. | Lidar, cameras, inertial measurement units (IMU), GPS. |
| Power Source | Electric actuators with possible hydraulic support. | Electric batteries, fuel cells, or hybrid systems. |
| Cost Range | Typically higher due to precision components. | Varies by complexity, generally lower than manipulators. |
Introduction to Manipulators and Mobile Bases
Manipulators are robotic arms designed to perform precise tasks such as assembly, welding, or material handling, characterized by multiple joints and end-effectors. Mobile bases, on the other hand, provide locomotion capabilities enabling robots to navigate through various environments, often equipped with wheels or tracks and sensors for path planning. Integrating manipulators with mobile bases enhances robotic versatility, allowing complex operations in dynamic or unstructured settings.
Fundamental Differences Between Manipulators and Mobile Bases
Manipulators are robotic arms designed for precise, controlled movement in fixed or semi-fixed positions, focusing on tasks like assembly, welding, or material handling. Mobile bases provide locomotion capabilities, enabling robots to navigate and transport objects across various environments, emphasizing mobility over fine manipulation. The fundamental difference lies in manipulators' dexterous task execution contrasted with mobile bases' spatial navigation and positioning functions.
Key Components of Manipulators
Manipulators consist of key components such as joints, links, actuators, sensors, and an end effector, all designed to perform precise and repetitive tasks. The articulated joints provide degrees of freedom enabling complex movements, while actuators typically include electric motors or hydraulic systems that control motion. Integrated sensors offer feedback for accuracy, allowing manipulators to execute delicate operations in manufacturing and assembly lines, differentiating them from the mobility-focused mobile base systems.
Core Features of Mobile Bases
Mobile bases in robotics primarily offer enhanced mobility through wheels or tracks, enabling robots to navigate diverse environments and perform tasks beyond fixed locations. Core features include autonomous navigation systems, obstacle detection sensors, and precise motion control algorithms, which collectively improve efficiency and adaptability. These bases support payload capacity and battery life optimization, crucial for prolonged and complex robotic operations.
Applications of Manipulators in Robotics
Manipulators in robotics excel at precise, repetitive tasks such as assembly, welding, and material handling in manufacturing environments. Their applications extend to medical robotics for surgeries and laboratory automation, where high dexterity and accuracy are essential. These robotic arms enable advanced manipulation capabilities, improving productivity and safety in controlled settings compared to mobile bases.
Use Cases for Mobile Bases
Mobile bases in robotics are essential for applications requiring dynamic movement across varying environments, such as warehouse automation, autonomous delivery, and search-and-rescue missions. These platforms provide mobility and flexibility, enabling robots to navigate complex spaces while carrying manipulators or sensors to perform tasks like material handling and environmental monitoring. The integration of advanced navigation algorithms and sensor fusion enhances the effectiveness of mobile bases in real-time decision-making and obstacle avoidance.
Advantages and Limitations of Manipulators
Manipulators offer precise control and high repeatability, making them ideal for tasks requiring exact positioning and complex movements in industrial automation. Their rigid structure enables handling heavy payloads with stability, yet they are limited by fixed workspaces and lack the flexibility to navigate dynamic environments. Unlike mobile bases, manipulators cannot move independently, restricting their application to stationary operations or integration with external transport systems.
Strengths and Weaknesses of Mobile Bases
Mobile bases offer enhanced mobility and flexibility, enabling robots to navigate complex environments and perform tasks across larger operational areas. Their strengths include adaptability for dynamic tasks, ease of redeployment, and the ability to carry manipulators and sensors for versatile applications. Limitations involve reduced payload capacity compared to fixed manipulators, challenges with stability during precise operations, and potential difficulties in uneven terrain navigation affecting accuracy and reliability.
Integration of Manipulators and Mobile Bases in Modern Robotics
Integration of manipulators and mobile bases in modern robotics enables enhanced operational flexibility and efficiency. Mobile bases provide locomotion across varied environments while manipulators execute precise tasks such as assembly, inspection, or material handling. The synergy between these systems supports advanced applications in manufacturing, logistics, and service robotics, driving innovation through improved adaptability and autonomy.
Choosing Between Manipulator and Mobile Base for Your Robotics Project
Choosing between a manipulator and a mobile base depends on the task requirements, workspace constraints, and desired flexibility in robotics projects. Manipulators excel in precision tasks requiring controlled, repeatable movements within a fixed area, whereas mobile bases provide enhanced mobility for navigating complex environments and extended operational reach. Evaluating payload capacity, degrees of freedom, and navigation capabilities helps optimize system integration and overall project efficiency.
Manipulator vs Mobile Base Infographic