Reactive planning in robotics enables real-time responses to dynamic environments by using sensor data to make immediate decisions without extensive computation. Deliberative planning involves creating detailed, long-term action sequences based on a comprehensive world model, optimizing task performance before execution. Balancing both approaches enhances robot adaptability and efficiency in complex, changing scenarios.
Table of Comparison
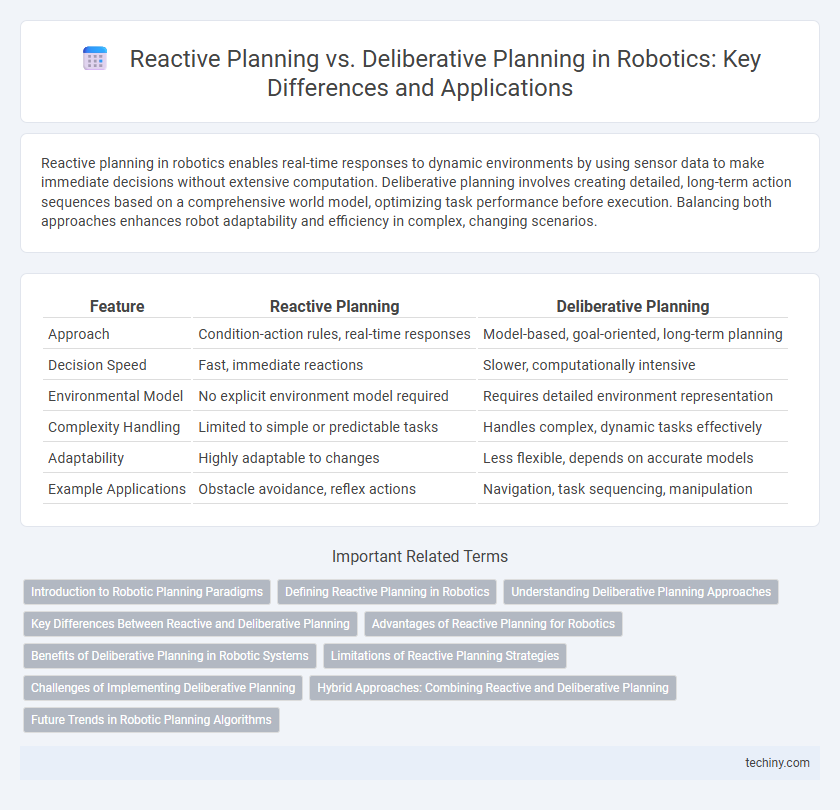
| Feature | Reactive Planning | Deliberative Planning |
|---|---|---|
| Approach | Condition-action rules, real-time responses | Model-based, goal-oriented, long-term planning |
| Decision Speed | Fast, immediate reactions | Slower, computationally intensive |
| Environmental Model | No explicit environment model required | Requires detailed environment representation |
| Complexity Handling | Limited to simple or predictable tasks | Handles complex, dynamic tasks effectively |
| Adaptability | Highly adaptable to changes | Less flexible, depends on accurate models |
| Example Applications | Obstacle avoidance, reflex actions | Navigation, task sequencing, manipulation |
Introduction to Robotic Planning Paradigms
Reactive planning in robotics emphasizes real-time responses to environmental changes through sensor-driven actions, enabling rapid adaptation to dynamic conditions. Deliberative planning involves constructing detailed action sequences based on environmental models, optimizing task completion before execution. These complementary paradigms balance efficiency and flexibility, forming the foundation of modern robotic planning systems.
Defining Reactive Planning in Robotics
Reactive planning in robotics refers to real-time decision-making processes where robots respond immediately to environmental changes without relying on precomputed models or extensive deliberation. This approach prioritizes low-latency sensor inputs and rapid action execution, enabling robots to adapt to dynamic and unpredictable scenarios efficiently. Reactive planning is crucial for tasks requiring swift responses, such as obstacle avoidance and emergency interventions.
Understanding Deliberative Planning Approaches
Deliberative planning in robotics involves creating detailed, long-term plans based on a comprehensive model of the environment, allowing robots to anticipate and optimize actions before execution. This approach contrasts reactive planning, which relies on real-time sensor data to make immediate decisions without extensive foresight. Key deliberative planning methods include state-space search, heuristic algorithms, and symbolic reasoning, which enhance a robot's ability to solve complex tasks with precision and efficiency.
Key Differences Between Reactive and Deliberative Planning
Reactive planning in robotics emphasizes immediate sensor-based responses, enabling rapid adaptation to dynamic environments without extensive computation. Deliberative planning involves constructing detailed models and pre-computing action sequences to achieve long-term goals with higher accuracy and predictability. Key differences include reaction speed, computational complexity, and reliance on environmental representation.
Advantages of Reactive Planning for Robotics
Reactive planning in robotics excels by enabling real-time responses to dynamic environments, significantly enhancing adaptability and robustness in unpredictable scenarios. This approach reduces computational complexity and latency since it relies on direct sensor-to-actuator feedback loops rather than extensive precomputed models. Robots utilizing reactive planning can efficiently handle unforeseen obstacles and changes, improving operational efficiency in applications such as autonomous navigation and industrial automation.
Benefits of Deliberative Planning in Robotic Systems
Deliberative planning in robotic systems enhances adaptability by enabling robots to analyze complex environments and predict future states for more informed decision-making. This approach allows for optimized resource allocation and task sequencing, resulting in increased efficiency and precision in mission execution. By integrating detailed environmental models, deliberative planning supports robust error recovery and long-term goal achievement in dynamic settings.
Limitations of Reactive Planning Strategies
Reactive planning strategies in robotics often struggle with handling complex tasks requiring long-term goals due to their reliance on immediate sensory inputs without internal models of the environment. These limitations manifest as difficulty in executing multi-step actions, leading to suboptimal performance in dynamic or partially observable settings. Lack of anticipatory reasoning in reactive systems hinders their ability to adapt to unforeseen changes beyond immediate stimuli.
Challenges of Implementing Deliberative Planning
Deliberative planning in robotics faces significant challenges due to its high computational demands and the need for accurate, up-to-date environmental models, which can be difficult to maintain in dynamic or uncertain environments. The complexity of generating long-term action sequences often leads to delays that reduce responsiveness, limiting the robot's ability to adapt quickly to unforeseen changes. Integrating real-time sensor data with symbolic reasoning remains a critical obstacle, as it requires balancing detailed planning with the flexibility inherent in reactive systems.
Hybrid Approaches: Combining Reactive and Deliberative Planning
Hybrid approaches in robotics integrate reactive and deliberative planning to leverage the real-time adaptability of reactive systems with the long-term strategic benefits of deliberative methods. This combination enhances robot performance in dynamic environments by enabling quick responses to unforeseen changes while maintaining goal-directed behavior through planning. Such systems use layered architectures where the deliberative layer formulates plans based on environmental models, and the reactive layer executes these plans while handling immediate stimuli.
Future Trends in Robotic Planning Algorithms
Emerging trends in robotic planning algorithms emphasize the integration of reactive and deliberative planning to enhance adaptability and efficiency in dynamic environments. Advanced hybrid models leverage machine learning and real-time sensor data to enable robots to anticipate and respond to changes while executing complex tasks. Future developments focus on scalable algorithms that balance immediate responsiveness with long-term strategic planning to optimize autonomous decision-making in diverse applications.
Reactive planning vs Deliberative planning Infographic