PWM control adjusts motor speed by varying the duty cycle of the voltage signal, offering simple implementation but limited precision in dynamic environments. PID control enhances performance by continuously calculating error values and adjusting actuator outputs, resulting in accurate and stable motor responses. Combining PWM with PID algorithms optimizes robotic motion control, balancing efficiency and precision for complex tasks.
Table of Comparison
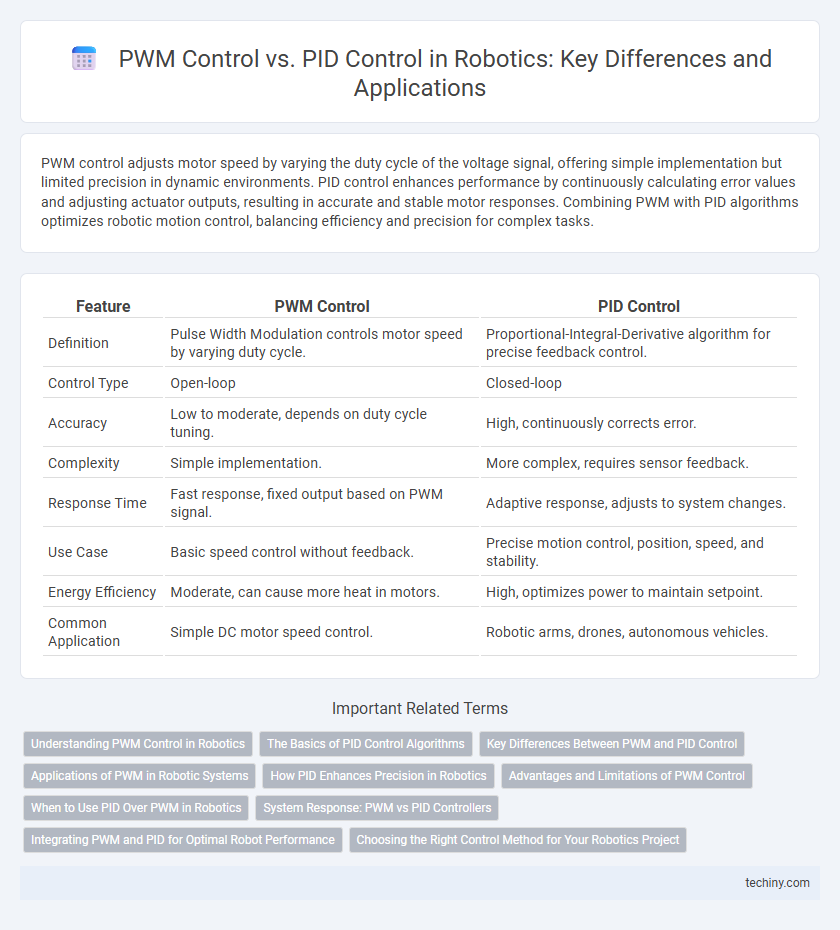
| Feature | PWM Control | PID Control |
|---|---|---|
| Definition | Pulse Width Modulation controls motor speed by varying duty cycle. | Proportional-Integral-Derivative algorithm for precise feedback control. |
| Control Type | Open-loop | Closed-loop |
| Accuracy | Low to moderate, depends on duty cycle tuning. | High, continuously corrects error. |
| Complexity | Simple implementation. | More complex, requires sensor feedback. |
| Response Time | Fast response, fixed output based on PWM signal. | Adaptive response, adjusts to system changes. |
| Use Case | Basic speed control without feedback. | Precise motion control, position, speed, and stability. |
| Energy Efficiency | Moderate, can cause more heat in motors. | High, optimizes power to maintain setpoint. |
| Common Application | Simple DC motor speed control. | Robotic arms, drones, autonomous vehicles. |
Understanding PWM Control in Robotics
PWM control in robotics involves modulating the width of voltage pulses to regulate motor speed and torque efficiently, offering precise power delivery with minimal energy loss. Unlike PID control, which adjusts motor response based on feedback for accurate positioning, PWM primarily manages the power supplied to actuators for smooth and adaptive motion control. Understanding PWM is essential for designing effective motor drivers that enhance robotic performance through scalable and responsive speed regulation.
The Basics of PID Control Algorithms
PID control algorithms adjust robotic actuators by continuously calculating the error between a desired setpoint and the actual position or speed, using proportional, integral, and derivative terms to minimize that error. PWM control modulates power to motors by varying the duty cycle of voltage pulses, but lacks the feedback mechanism to correct deviations dynamically. Implementing PID control in robotics enhances precision and stability over simple PWM by actively compensating for disturbances and system nonlinearities.
Key Differences Between PWM and PID Control
PWM control regulates motor speed by adjusting the duty cycle of voltage pulses, providing simple on/off switching that directly influences power delivery. PID control employs a feedback loop using proportional, integral, and derivative terms to continuously minimize error between desired and actual motor positions or speeds, enhancing precision and stability. Unlike PWM's straightforward modulation, PID enables adaptive control in dynamic environments, crucial for complex robotic motion and accurate positioning.
Applications of PWM in Robotic Systems
Pulse Width Modulation (PWM) is extensively used in robotic systems for controlling the speed and torque of DC motors by varying the duty cycle of the power supplied, enabling precise motor control. PWM effectively manages power delivery to actuators, improving energy efficiency and reducing heat dissipation in robotic arms and mobile robots. Its simplicity and compatibility with microcontrollers make PWM ideal for applications such as servo motor control, robotic grippers, and variable speed drives in autonomous robots.
How PID Enhances Precision in Robotics
PID control improves precision in robotics by continuously adjusting motor output based on proportional, integral, and derivative feedback to minimize error between desired and actual positions. Unlike PWM control, which only modulates power delivery to motors, PID control dynamically compensates for disturbances and nonlinearities in mechanical systems. This real-time feedback loop enables smoother motion, exact positioning, and better stability in robotic manipulators and mobile robots.
Advantages and Limitations of PWM Control
PWM control offers precise adjustment of motor speed by varying the duty cycle, enabling efficient energy use and reduced heat generation in robotic actuators. The simplicity of PWM implementation makes it cost-effective and reliable for basic motor control without requiring complex feedback systems. However, PWM lacks the adaptive correction capabilities of PID control, leading to potential performance issues under varying load conditions or dynamic environments.
When to Use PID Over PWM in Robotics
PID control is preferred over PWM in robotics when precise and stable motor speed or position regulation is required, especially in applications involving dynamic or unpredictable environments. PID algorithms continuously adjust motor inputs based on feedback from sensors, enabling smooth acceleration, deceleration, and accurate control compared to the simple on-off nature of PWM. This makes PID essential for tasks such as robotic arm manipulation, drone flight stabilization, and autonomous vehicle navigation where accuracy and responsiveness are critical.
System Response: PWM vs PID Controllers
PWM control regulates motor speed by varying the duty cycle of voltage pulses, resulting in straightforward but sometimes oscillatory system response due to its on-off nature. PID controllers continuously adjust the motor input based on proportional, integral, and derivative terms, enabling precise and stable system response with reduced steady-state error and overshoot. Comparing system response, PID control achieves smoother and faster convergence to the target setpoint, while PWM alone may exhibit slower settling and increased oscillations.
Integrating PWM and PID for Optimal Robot Performance
Integrating PWM (Pulse Width Modulation) with PID (Proportional-Integral-Derivative) control enhances robot motor precision by combining efficient power delivery and dynamic error correction. PWM regulates motor speed through adjustable duty cycles, while PID continuously adjusts control signals based on feedback to minimize deviation from desired trajectories. This synergy improves response time, stability, and energy efficiency in robotic systems, enabling smoother and more accurate movements.
Choosing the Right Control Method for Your Robotics Project
PWM control offers straightforward implementation and efficient power regulation, making it ideal for simple robotic actuators requiring basic speed or position adjustments. PID control excels in precision and adaptability, effectively minimizing error through proportional, integral, and derivative adjustments, which suits complex robotic systems demanding accurate and stable performance. Selecting the right control method depends on the specific application's complexity, desired accuracy, and system dynamics within your robotics project.
PWM control vs PID control Infographic