Hybrid locomotion combines wheels and legs to optimize mobility across diverse terrains, offering both speed and stability where purely legged robots may struggle. It enables efficient navigation on flat surfaces while maintaining the adaptability of legged systems in rough or uneven environments. This approach enhances energy efficiency by leveraging wheeled movement when possible and switching to legged motion for obstacle negotiation.
Table of Comparison
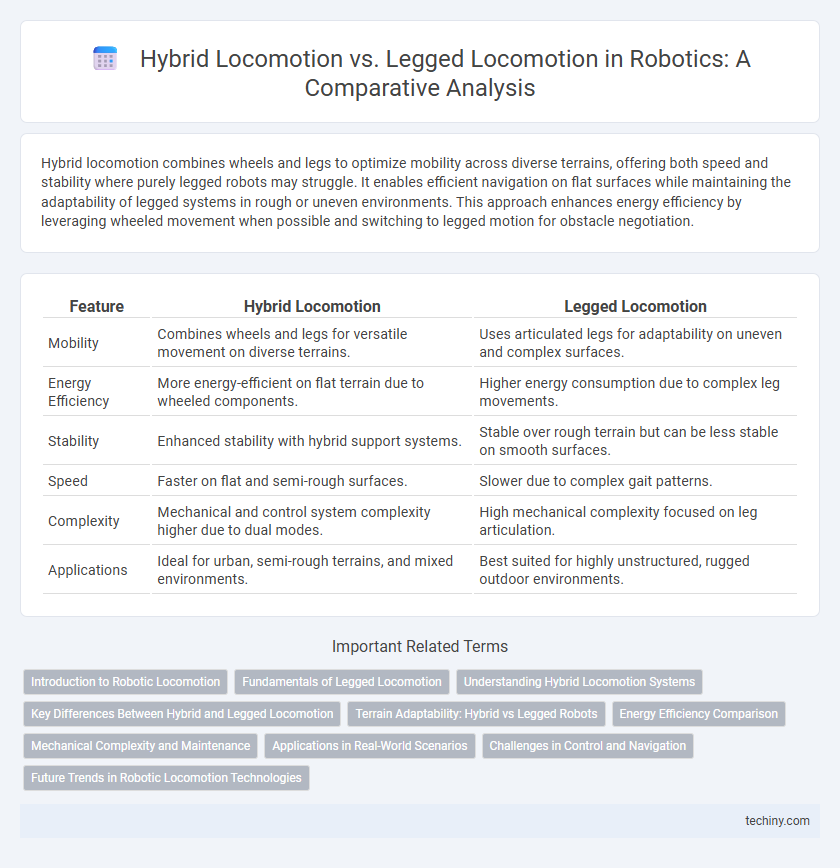
| Feature | Hybrid Locomotion | Legged Locomotion |
|---|---|---|
| Mobility | Combines wheels and legs for versatile movement on diverse terrains. | Uses articulated legs for adaptability on uneven and complex surfaces. |
| Energy Efficiency | More energy-efficient on flat terrain due to wheeled components. | Higher energy consumption due to complex leg movements. |
| Stability | Enhanced stability with hybrid support systems. | Stable over rough terrain but can be less stable on smooth surfaces. |
| Speed | Faster on flat and semi-rough surfaces. | Slower due to complex gait patterns. |
| Complexity | Mechanical and control system complexity higher due to dual modes. | High mechanical complexity focused on leg articulation. |
| Applications | Ideal for urban, semi-rough terrains, and mixed environments. | Best suited for highly unstructured, rugged outdoor environments. |
Introduction to Robotic Locomotion
Hybrid locomotion in robotics combines the versatility of legged movement with the speed and stability of wheeled or tracked systems, enabling robots to navigate diverse terrains effectively. Legged locomotion emphasizes adaptability and obstacle traversal through articulated limbs, mimicking biological organisms for enhanced mobility in unstructured environments. Both approaches address key challenges in robotic locomotion, such as energy efficiency, balance, and terrain adaptability, shaping the development of autonomous robotic systems.
Fundamentals of Legged Locomotion
Legged locomotion in robotics is grounded in biomechanical principles that enable robots to navigate complex terrains by mimicking animal movement through articulated joints and dynamic balancing. This mode of locomotion relies on precise control algorithms to manage stability, energy efficiency, and adaptability during motion phases such as stance and swing. Understanding foothold placement, center of mass regulation, and gait patterns is essential for optimizing robotic legged systems in uneven or unpredictable environments.
Understanding Hybrid Locomotion Systems
Hybrid locomotion systems in robotics combine the advantages of wheeled and legged locomotion to enhance mobility across varied terrains. These systems utilize wheels for efficient movement on smooth surfaces and legs to overcome obstacles and uneven ground, providing optimal versatility. Integrating sensors and control algorithms enables real-time adaptation, improving stability and energy efficiency in complex environments.
Key Differences Between Hybrid and Legged Locomotion
Hybrid locomotion in robotics combines wheels and legs to balance speed on flat surfaces with adaptability over rough terrain, whereas legged locomotion relies solely on articulated limbs for enhanced maneuverability and obstacle negotiation. Hybrid robots typically achieve higher energy efficiency and stability on mixed environments due to their dual-mode capabilities, while legged robots excel in complex, unstructured terrains with precise foot placement and environmental compliance. The key differences hinge on trade-offs in complexity, energy consumption, terrain versatility, and gait adaptability, making hybrid locomotion suitable for versatile tasks and legged locomotion optimal for dynamic, unpredictable settings.
Terrain Adaptability: Hybrid vs Legged Robots
Hybrid locomotion robots combine wheels and legs to offer superior terrain adaptability, enabling smooth transitions between flat surfaces and rough, uneven ground. Legged robots excel in navigating complex terrains such as rocky, muddy, or stair-filled environments by adjusting individual limbs for stability and balance. Terrain adaptability in hybrid robots is enhanced by the integration of versatile movement modes, outperforming purely legged robots in speed and energy efficiency on mixed surfaces.
Energy Efficiency Comparison
Hybrid locomotion systems combining wheels and legs demonstrate superior energy efficiency over purely legged robots by optimizing power consumption across diverse terrains. Legged locomotion often incurs higher energy costs due to complex joint movements and continuous balance adjustments required for dynamic stability. Studies indicate hybrid robots reduce overall energy expenditure by leveraging wheeled motion on flat surfaces and switching to legs when traversing obstacles, enhancing operational endurance in real-world applications.
Mechanical Complexity and Maintenance
Hybrid locomotion systems combine wheels and legs, increasing mechanical complexity due to the integration of multiple drive mechanisms and joint actuators, which requires advanced control algorithms and sensors for seamless operation. Legged locomotion robots generally feature a higher number of joints and actuators, leading to intricate mechanical designs prone to wear and tear, demanding frequent maintenance and precise calibration to ensure stability and mobility. Maintenance in hybrid systems may be less intensive than purely legged robots as wheels typically require less upkeep than multiple leg joints, but overall system reliability depends on efficient coordination between both locomotion modes.
Applications in Real-World Scenarios
Hybrid locomotion systems in robotics combine wheels and legs to optimize mobility across varied terrains, excelling in disaster response and exploration where adaptability is crucial. Legged locomotion offers superior maneuverability in uneven and complex environments, making it ideal for search and rescue missions in rubble-strewn or forested areas. Both approaches enhance robotic capabilities for real-world applications, with hybrids providing energy efficiency on flat surfaces and legs delivering agility in challenging landscapes.
Challenges in Control and Navigation
Hybrid locomotion combines wheels and legs to enhance mobility but faces complex control algorithms to seamlessly switch between modes and maintain balance. Legged locomotion requires precise sensor integration and real-time feedback to manage dynamic stability and adapt to uneven terrain. Both approaches demand advanced navigation systems to interpret environmental data and execute efficient path planning under diverse conditions.
Future Trends in Robotic Locomotion Technologies
Hybrid locomotion systems, combining wheels and legs, enhance adaptability and energy efficiency in complex terrains, driving future trends in robotic mobility. Advanced sensor integration and AI algorithms enable seamless transition between modes, improving stability and speed in varied environments. Emerging materials and actuation techniques promise lightweight, robust designs that optimize hybrid locomotion performance for diverse applications in search and rescue, exploration, and industrial automation.
Hybrid locomotion vs Legged locomotion Infographic