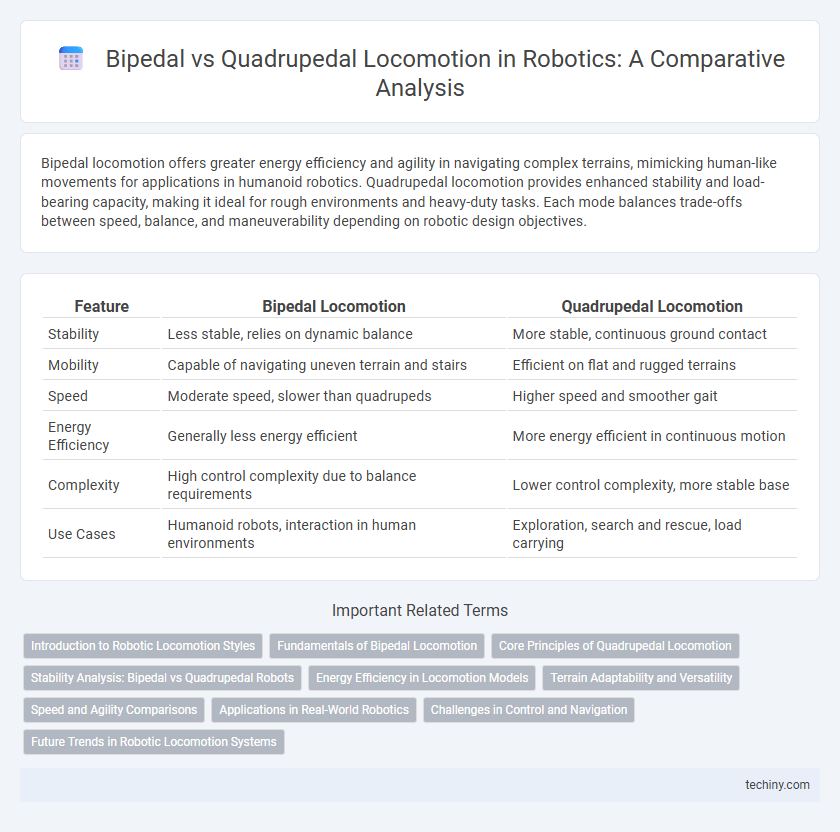
Bipedal locomotion offers greater energy efficiency and agility in navigating complex terrains, mimicking human-like movements for applications in humanoid robotics. Quadrupedal locomotion provides enhanced stability and load-bearing capacity, making it ideal for rough environments and heavy-duty tasks. Each mode balances trade-offs between speed, balance, and maneuverability depending on robotic design objectives.
Table of Comparison
| Feature | Bipedal Locomotion | Quadrupedal Locomotion |
|---|---|---|
| Stability | Less stable, relies on dynamic balance | More stable, continuous ground contact |
| Mobility | Capable of navigating uneven terrain and stairs | Efficient on flat and rugged terrains |
| Speed | Moderate speed, slower than quadrupeds | Higher speed and smoother gait |
| Energy Efficiency | Generally less energy efficient | More energy efficient in continuous motion |
| Complexity | High control complexity due to balance requirements | Lower control complexity, more stable base |
| Use Cases | Humanoid robots, interaction in human environments | Exploration, search and rescue, load carrying |
Introduction to Robotic Locomotion Styles
Bipedal locomotion in robotics mimics human walking using two legs, offering advantages in navigating complex, uneven terrains and confined spaces. Quadrupedal locomotion employs four legs, providing superior stability, load distribution, and adaptability on rough surfaces. Choosing between bipedal and quadrupedal designs depends on the robot's intended tasks, environmental challenges, and balance requirements.
Fundamentals of Bipedal Locomotion
Bipedal locomotion in robotics involves dynamic balance, weight shifting, and precise control of joint actuators to mimic human walking patterns. Key fundamentals include center of mass regulation, zero moment point (ZMP) stability, and gait cycle coordination for efficient and adaptable movement. These principles distinguish bipedal robots by enabling upright mobility and complex terrain navigation compared to quadrupedal systems.
Core Principles of Quadrupedal Locomotion
Quadrupedal locomotion relies on the stable base provided by four limbs, enabling enhanced balance and weight distribution, especially over uneven terrain. Central to its core principles are gait patterns like walk, trot, and gallop, which optimize energy efficiency and speed by coordinating limb movements in rhythmic sequences. Sensorimotor integration and adaptive control systems ensure effective stability and maneuverability, making quadrupedal robots suitable for diverse environments.
Stability Analysis: Bipedal vs Quadrupedal Robots
Stability analysis in bipedal locomotion emphasizes dynamic balance control due to fewer ground contact points, requiring advanced feedback systems like zero moment point (ZMP) and center of mass (CoM) regulation. Quadrupedal robots achieve enhanced stability via a larger support polygon, allowing for more robust static and dynamic postures during locomotion. Comparative studies show quadrupedal platforms outperform bipeds in terrain adaptability and continuous support, reducing the risk of tipping and improving overall locomotion reliability.
Energy Efficiency in Locomotion Models
Bipedal locomotion models demonstrate higher energy efficiency in stable terrains due to optimized joint actuation and reduced limb mass, enabling efficient dynamic walking and running. Quadrupedal locomotion systems excel in energy conservation over uneven or complex terrains by distributing mechanical load across four limbs, minimizing individual limb work and enhancing stability. Comparative studies reveal that bipedal robots achieve lower metabolic cost of transport in controlled environments, while quadrupedal robots maintain superior energy efficiency during adaptive locomotion on challenging surfaces.
Terrain Adaptability and Versatility
Bipedal locomotion offers enhanced maneuverability in constrained human environments, enabling robots to navigate stairs and narrow passages with agility, though it often faces stability challenges on uneven terrains. Quadrupedal locomotion provides superior stability and traction on rough or irregular surfaces due to its four-point contact, making it highly adaptable for outdoor and rugged terrain exploration. Versatility in robotics is achieved by selecting locomotion based on mission-specific terrain requirements, balancing the bipedal ability for complex, confined environments against the quadrupedal strengths in stability and terrain adaptability.
Speed and Agility Comparisons
Bipedal locomotion typically allows for greater agility due to its ability to navigate uneven terrain and perform complex maneuvers, although it often sacrifices speed compared to quadrupedal robots. Quadrupedal locomotion offers enhanced stability and higher top speeds by distributing weight across four limbs, enabling efficient rapid movement over various surfaces. Advances in sensor technology and control algorithms continue to narrow the speed gap, but quadrupeds remain superior for fast, stable traversal in robotics applications.
Applications in Real-World Robotics
Bipedal locomotion in robotics is widely applied in humanoid robots designed for human-centric environments, enabling tasks such as walking on uneven terrain, climbing stairs, and performing complex manipulation in constrained spaces. Quadrupedal robots excel in stability and speed across rough or unpredictable outdoor terrain, making them ideal for search and rescue operations, agricultural monitoring, and inspection in hazardous environments. Both locomotion types integrate advanced sensor fusion, real-time balance control, and adaptive gait algorithms to optimize performance for specific real-world applications.
Challenges in Control and Navigation
Bipedal locomotion presents significant challenges in balance control and stability due to its inherently unstable two-legged structure, requiring advanced dynamic algorithms and precise real-time feedback systems. Quadrupedal locomotion offers greater stability and easier terrain adaptability, but its control complexity increases with the need to coordinate multiple limbs and manage gait patterns efficiently. Navigational challenges in both systems demand robust sensor integration and adaptive path planning to ensure reliable movement in unpredictable environments.
Future Trends in Robotic Locomotion Systems
Bipedal locomotion in robotics offers enhanced agility and human-like interaction capabilities, making it ideal for navigating complex, uneven terrains in future urban and disaster-response applications. Quadrupedal robots demonstrate superior stability and energy efficiency, which are crucial for extended autonomous operations in agriculture and exploration environments. Advances in AI-driven control algorithms and lightweight materials are accelerating the convergence of these locomotion systems, enabling versatile robots capable of adaptive movement across diverse real-world scenarios.
Bipedal locomotion vs Quadrupedal locomotion Infographic