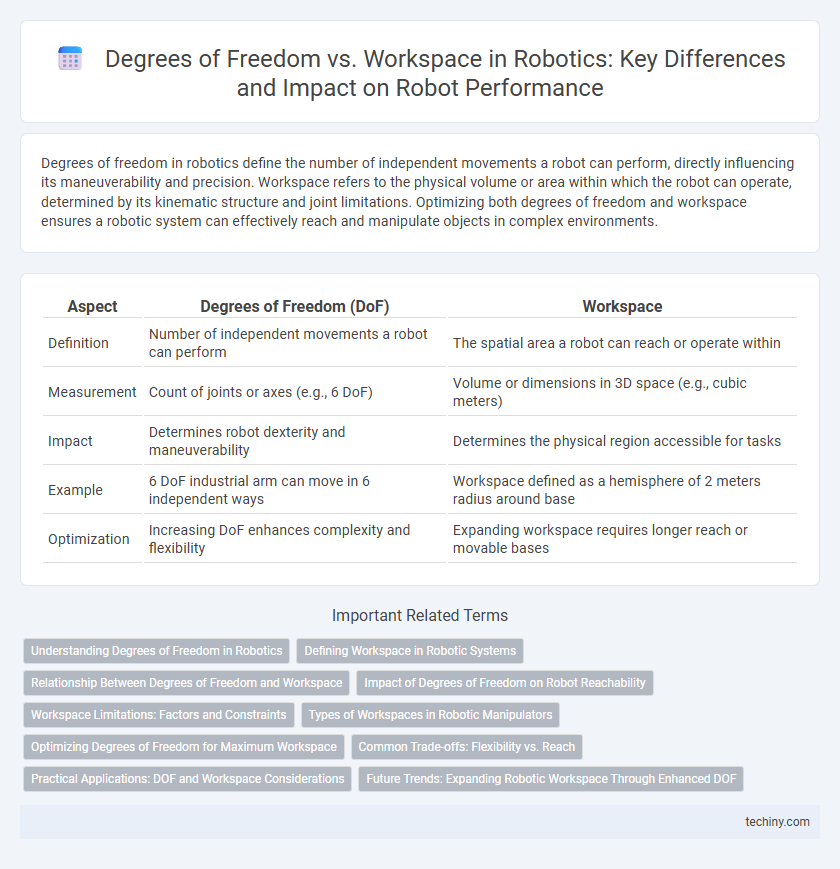
Degrees of freedom in robotics define the number of independent movements a robot can perform, directly influencing its maneuverability and precision. Workspace refers to the physical volume or area within which the robot can operate, determined by its kinematic structure and joint limitations. Optimizing both degrees of freedom and workspace ensures a robotic system can effectively reach and manipulate objects in complex environments.
Table of Comparison
| Aspect | Degrees of Freedom (DoF) | Workspace |
|---|---|---|
| Definition | Number of independent movements a robot can perform | The spatial area a robot can reach or operate within |
| Measurement | Count of joints or axes (e.g., 6 DoF) | Volume or dimensions in 3D space (e.g., cubic meters) |
| Impact | Determines robot dexterity and maneuverability | Determines the physical region accessible for tasks |
| Example | 6 DoF industrial arm can move in 6 independent ways | Workspace defined as a hemisphere of 2 meters radius around base |
| Optimization | Increasing DoF enhances complexity and flexibility | Expanding workspace requires longer reach or movable bases |
Understanding Degrees of Freedom in Robotics
Degrees of freedom (DOF) in robotics refer to the number of independent movements a robot joint or link can perform, directly affecting its dexterity and precision. A higher DOF enhances a robot's ability to maneuver within its workspace, enabling complex tasks such as assembly, welding, and surgery. Understanding DOF is crucial for designing robots that can efficiently navigate and operate in three-dimensional spaces, optimizing their functional workspace and task adaptability.
Defining Workspace in Robotic Systems
Workspace in robotic systems refers to the three-dimensional volume or area that the robot's end-effector can reach and operate within, constrained by the robot's mechanical design and joint limits. The degrees of freedom (DOF) dictate the robot's ability to position and orient its end-effector within this workspace, influencing the complexity and flexibility of tasks it can perform. Understanding the workspace is critical for optimizing robot placement, path planning, and task feasibility in automation and manufacturing environments.
Relationship Between Degrees of Freedom and Workspace
The degrees of freedom (DOF) in a robotic manipulator directly influence its workspace size and shape, as each additional DOF allows the robot to reach more points within a three-dimensional space. Robots with higher DOF can perform complex tasks requiring intricate positioning and orientation, expanding their operational envelope. However, increasing DOF also adds kinematic complexity, which must be carefully managed to optimize workspace efficiency and control precision.
Impact of Degrees of Freedom on Robot Reachability
Degrees of freedom (DOF) in robotics directly influence a robot's reachability by determining the number of independent movements the robot can perform, thereby expanding its operational workspace. Robots with higher DOF possess enhanced maneuverability, allowing them to access complex and obstructed environments that lower DOF robots cannot reach. Optimizing the number of DOF is crucial for applications requiring precise manipulation and extended spatial coverage within robotic workspaces.
Workspace Limitations: Factors and Constraints
Workspace limitations in robotics are primarily influenced by the number of degrees of freedom (DOF), mechanical design, and joint constraints. While higher DOF increases maneuverability, factors such as link lengths, actuator reach, and collision avoidance impose spatial boundaries on the robot's effective workspace. Understanding these constraints is essential for optimizing robotic system performance in tasks requiring precise movement within confined environments.
Types of Workspaces in Robotic Manipulators
Robotic manipulators have diverse workspaces defined by their degrees of freedom (DOF), influencing the spatial range they can reach and operate within. Common types of workspaces include spherical, cylindrical, and Cartesian, each corresponding to specific configurations of joints and links that determine the robot's motion capabilities. Understanding these workspace types aids in selecting suitable manipulators for tasks requiring precise reach and maneuverability in complex environments.
Optimizing Degrees of Freedom for Maximum Workspace
Maximizing workspace in robotics requires optimizing degrees of freedom (DOF) to enhance manipulator reach and flexibility without introducing unnecessary complexity. Incorporating the minimal DOF needed for target tasks reduces mechanical constraints and control challenges, thereby improving precision and operational efficiency. Designing robotic arms with strategically placed rotational and translational joints expands the effective workspace, enabling access to diverse positions and orientations essential for advanced applications.
Common Trade-offs: Flexibility vs. Reach
Degrees of freedom (DoF) directly influence a robot's flexibility, enabling complex movements and precise manipulation in confined spaces. Increased DoF often reduces the overall workspace reach due to mechanical complexity and joint limitations, posing challenges in applications requiring extended range. Balancing flexibility and reach involves optimizing kinematic design to ensure sufficient maneuverability without sacrificing operational distance.
Practical Applications: DOF and Workspace Considerations
Robotic manipulators with higher degrees of freedom (DOF) offer increased flexibility and precision, enabling complex tasks such as assembly, welding, and surgical procedures within constrained environments. Workspace size directly influences the robot's ability to access various positions and orientations, critical for applications in manufacturing cells where reachability affects productivity and safety. Optimizing the balance between DOF and workspace ensures efficient operation, minimizing collision risks while maximizing task coverage in industrial and service robotics.
Future Trends: Expanding Robotic Workspace Through Enhanced DOF
Future trends in robotics focus on expanding workspace by increasing degrees of freedom (DOF), allowing robots to perform complex tasks with greater precision and flexibility. Enhanced DOF enables robotic arms and mobile platforms to navigate intricate environments and access previously unreachable areas. Advanced control algorithms and lightweight materials further optimize the balance between extended workspace and maneuverability, driving innovation in industrial automation and service robotics.
Degrees of freedom vs Workspace Infographic