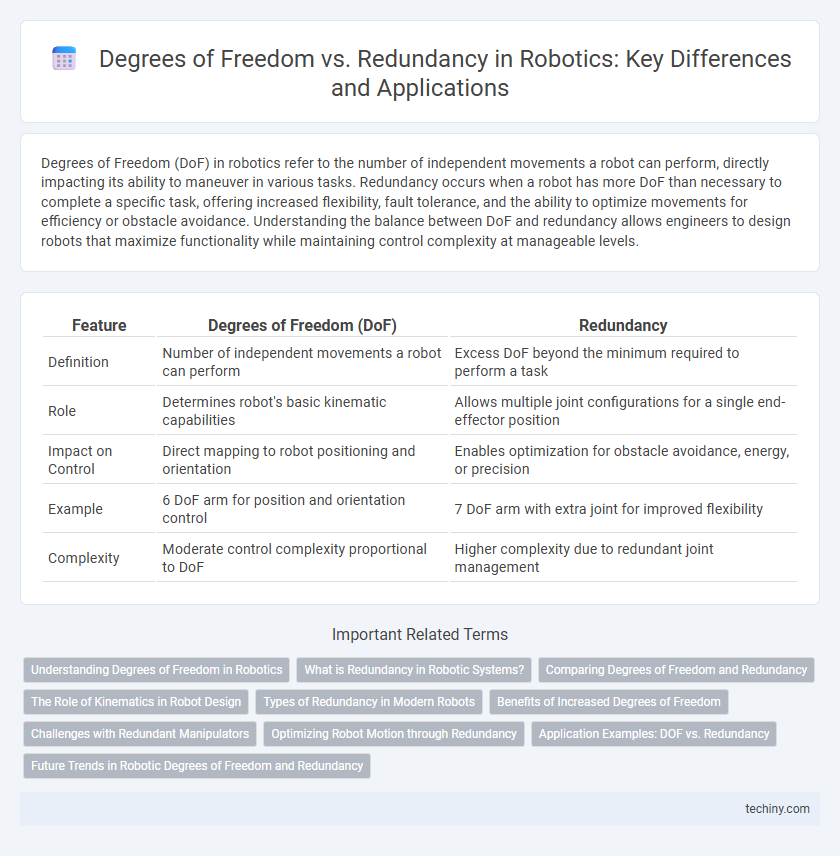
Degrees of Freedom (DoF) in robotics refer to the number of independent movements a robot can perform, directly impacting its ability to maneuver in various tasks. Redundancy occurs when a robot has more DoF than necessary to complete a specific task, offering increased flexibility, fault tolerance, and the ability to optimize movements for efficiency or obstacle avoidance. Understanding the balance between DoF and redundancy allows engineers to design robots that maximize functionality while maintaining control complexity at manageable levels.
Table of Comparison
| Feature | Degrees of Freedom (DoF) | Redundancy |
|---|---|---|
| Definition | Number of independent movements a robot can perform | Excess DoF beyond the minimum required to perform a task |
| Role | Determines robot's basic kinematic capabilities | Allows multiple joint configurations for a single end-effector position |
| Impact on Control | Direct mapping to robot positioning and orientation | Enables optimization for obstacle avoidance, energy, or precision |
| Example | 6 DoF arm for position and orientation control | 7 DoF arm with extra joint for improved flexibility |
| Complexity | Moderate control complexity proportional to DoF | Higher complexity due to redundant joint management |
Understanding Degrees of Freedom in Robotics
Degrees of freedom (DOF) in robotics represent the number of independent movements a robot can perform, such as translations and rotations along various axes. Understanding DOF is crucial for designing robotic arms capable of precise manipulation and complex tasks, as it dictates the robot's ability to position and orient its end effector. A robot's redundancy arises when it possesses more DOF than necessary, enabling enhanced flexibility and obstacle avoidance during operation.
What is Redundancy in Robotic Systems?
Redundancy in robotic systems refers to the presence of extra degrees of freedom beyond what is necessary to perform a given task, enabling enhanced flexibility and fault tolerance. This surplus of joints or actuators allows robots to avoid obstacles, optimize movements, and continue operation despite individual component failures. By leveraging redundancy, robotic manipulators can achieve more complex and adaptive behaviors in dynamic environments.
Comparing Degrees of Freedom and Redundancy
Degrees of Freedom (DOF) in robotics define the number of independent movements a robot can perform, directly impacting its ability to manipulate objects and navigate environments. Redundancy arises when a robot has more DOF than the minimum required for a specific task, allowing for greater flexibility, improved fault tolerance, and smoother motion trajectories. Comparing DOF and redundancy highlights the trade-off between mechanical complexity and enhanced control capabilities essential for sophisticated robotic applications.
The Role of Kinematics in Robot Design
Degrees of freedom (DOF) define the number of independent movements a robot can perform, directly influencing its flexibility and precision. Redundancy occurs when a robot's DOF exceeds the minimum required for a task, enhancing fault tolerance and maneuverability in complex environments. Kinematics plays a crucial role in robot design by calculating joint parameters needed to achieve desired end-effector positions, enabling optimization of both DOF and redundancy for efficient task execution.
Types of Redundancy in Modern Robots
Modern robots exhibit various types of redundancy to enhance dexterity and operational flexibility, including kinematic, actuation, and sensory redundancy. Kinematic redundancy allows robots to achieve a higher number of degrees of freedom than required for a primary task, enabling obstacle avoidance and optimized motion paths. Actuation redundancy involves multiple actuators controlling the same joint or function, increasing fault tolerance, while sensory redundancy integrates diverse sensors to improve environmental perception and situational awareness.
Benefits of Increased Degrees of Freedom
In robotics, increased degrees of freedom (DOF) enhance a robot's dexterity by allowing more complex and precise movements in multiple axes, improving task adaptability. Higher DOF contributes to better obstacle avoidance and smoother trajectory planning, essential for dynamic and unstructured environments. This redundancy also enables fault tolerance, where the system can maintain functionality even if certain joints or actuators fail.
Challenges with Redundant Manipulators
Redundant manipulators, possessing more degrees of freedom than necessary for a given task, present complex challenges in control and motion planning due to the infinite possible joint configurations achieving the same end-effector position. Managing inverse kinematics becomes computationally intensive, requiring advanced optimization algorithms to resolve redundancy while avoiding singularities and joint limits. Effective redundancy resolution strategies enhance robot flexibility but demand sophisticated sensing and real-time processing capabilities to ensure precise and stable operation.
Optimizing Robot Motion through Redundancy
Optimizing robot motion through redundancy involves leveraging additional degrees of freedom (DoF) beyond the minimum required for a task, enabling smoother and more efficient movements. Redundancy in robotic arms allows for flexibility in avoiding obstacles, minimizing energy consumption, and optimizing joint configurations to improve precision. Utilizing advanced algorithms such as inverse kinematics and redundancy resolution enhances the robot's capability to perform complex tasks while maintaining stability and operational safety.
Application Examples: DOF vs. Redundancy
Robotic arms with six Degrees of Freedom (DOF) can position an end effector in 3D space with precise orientation, essential for tasks like assembly and welding. Redundancy occurs when a robot has more DOF than required, such as seven or more joints, enabling obstacle avoidance and complex maneuvering in confined environments, like surgical robots or humanoid robots navigating cluttered spaces. Redundant manipulators provide increased flexibility and fault tolerance, improving performance in dynamic and unpredictable application scenarios.
Future Trends in Robotic Degrees of Freedom and Redundancy
Future trends in robotic degrees of freedom emphasize the integration of hyper-redundant manipulators, enhancing adaptability and precision in complex tasks. Advances in AI-driven control algorithms enable real-time optimization of redundant joints, improving dexterity and fault tolerance. Emerging soft robotics technologies introduce flexible degrees of freedom, expanding operational capabilities in unstructured environments.
Degrees of Freedom vs Redundancy Infographic