Autonomous navigation enables robots to independently interpret sensor data and make real-time decisions for path planning, enhancing efficiency in dynamic environments. Remote navigation relies on human operators to control robot movements through wireless communication, offering precision in complex or unpredictable scenarios. Balancing these approaches can improve operational flexibility and adaptability in various robotic applications.
Table of Comparison
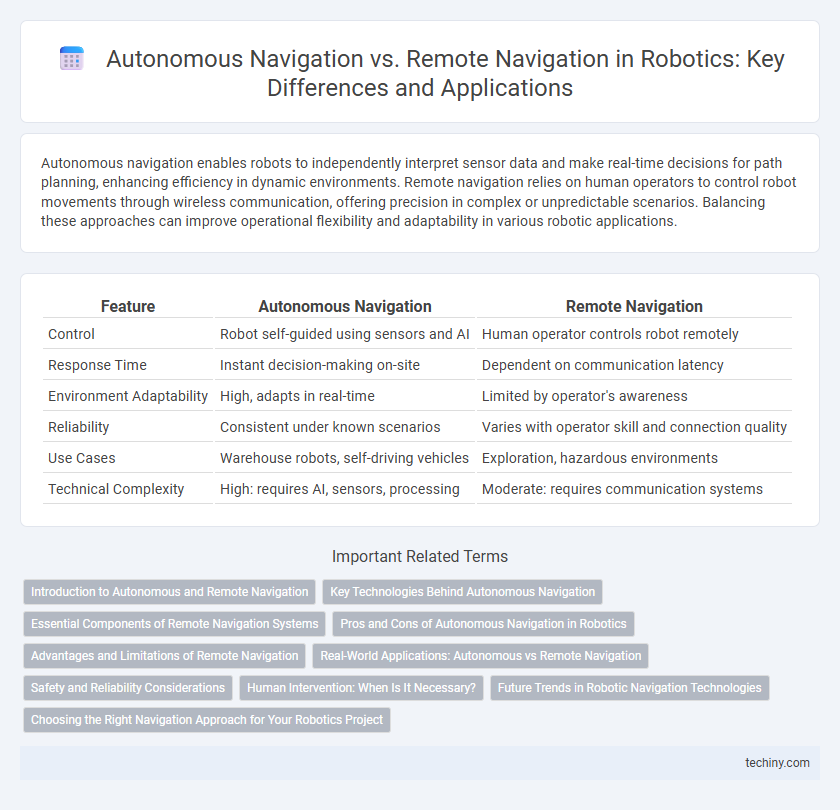
| Feature | Autonomous Navigation | Remote Navigation |
|---|---|---|
| Control | Robot self-guided using sensors and AI | Human operator controls robot remotely |
| Response Time | Instant decision-making on-site | Dependent on communication latency |
| Environment Adaptability | High, adapts in real-time | Limited by operator's awareness |
| Reliability | Consistent under known scenarios | Varies with operator skill and connection quality |
| Use Cases | Warehouse robots, self-driving vehicles | Exploration, hazardous environments |
| Technical Complexity | High: requires AI, sensors, processing | Moderate: requires communication systems |
Introduction to Autonomous and Remote Navigation
Autonomous navigation enables robots to independently perceive, plan, and execute movements using sensors, artificial intelligence, and environmental mapping, enhancing efficiency in dynamic and unpredictable settings. Remote navigation relies on human operators to control robots via wireless communication, offering precision in complex tasks where automated decision-making is limited or risky. Advances in simultaneous localization and mapping (SLAM) and teleoperation technologies are driving innovations in both navigation methods across industries such as manufacturing, exploration, and healthcare.
Key Technologies Behind Autonomous Navigation
Autonomous navigation relies heavily on advanced sensor fusion technologies, integrating LIDAR, RADAR, and computer vision to create accurate real-time environmental maps. Machine learning algorithms, particularly deep learning neural networks, process complex data streams to enable decision-making and obstacle avoidance without human intervention. SLAM (Simultaneous Localization and Mapping) systems play a crucial role in autonomous navigation by continuously updating the robot's position while mapping unknown environments.
Essential Components of Remote Navigation Systems
Remote navigation systems in robotics rely heavily on essential components such as high-resolution cameras, real-time data transmission modules, and precise control interfaces to enable operators to guide robots from a distance. These systems often integrate advanced sensors like LIDAR and ultrasonic detectors to provide comprehensive environmental feedback, ensuring accurate maneuvering in complex settings. Robust communication links, including secure wireless networks, are critical for maintaining uninterrupted control and responsiveness during remote navigation tasks.
Pros and Cons of Autonomous Navigation in Robotics
Autonomous navigation in robotics enables machines to operate independently using sensors, AI algorithms, and real-time environment mapping, enhancing efficiency and reducing human intervention. The primary advantages include increased operational speed, continuous functioning in hazardous or inaccessible areas, and improved adaptability to dynamic environments. However, limitations involve higher development costs, potential inaccuracies in complex or unpredictable settings, and challenges in ensuring robust safety and reliability.
Advantages and Limitations of Remote Navigation
Remote navigation in robotics offers precise human control over complex or unpredictable environments, allowing operators to make real-time decisions based on visual feedback and sensor data. Its advantages include enhanced safety by keeping humans distant from hazardous zones and the flexibility to manage tasks beyond current autonomous system capabilities. Limitations involve latency issues, dependence on stable communication links, and reduced efficiency in dynamic or large-scale operations compared to fully autonomous navigation systems.
Real-World Applications: Autonomous vs Remote Navigation
Autonomous navigation enables robots to independently interpret sensor data, create maps, and make real-time decisions, crucial for applications like warehouse automation and self-driving vehicles. Remote navigation relies on human operators to control robots, often used in hazardous environments such as bomb disposal or deep-sea exploration where direct human presence is risky. The choice between autonomous and remote navigation hinges on factors like environmental complexity, latency tolerance, and the need for human judgment in decision-making.
Safety and Reliability Considerations
Autonomous navigation systems utilize advanced sensors and AI algorithms to continuously assess the environment, significantly reducing human error and enhancing safety in dynamic and unpredictable settings. Remote navigation relies heavily on operator input and communication signals, which can introduce latency and potential failures, impacting reliability during critical operations. Ensuring robust fail-safe mechanisms and real-time data processing is essential for both methods to maintain safety standards and operational integrity.
Human Intervention: When Is It Necessary?
Autonomous navigation systems operate independently using sensors and AI algorithms, significantly reducing human intervention in real-time decision-making. Remote navigation requires continuous or intermittent human control, especially in complex or unpredictable environments where machine perception may fail. Human intervention becomes necessary during system errors, unexpected obstacles, or mission-critical scenarios to ensure safety and accuracy.
Future Trends in Robotic Navigation Technologies
Future trends in robotic navigation will largely focus on enhancing autonomous navigation through advanced AI algorithms, sensor fusion, and real-time environment mapping, enabling robots to operate with higher efficiency and safety in complex, dynamic settings. Remote navigation will benefit from improvements in 5G and edge computing, allowing for lower latency and more precise human-robot interaction over greater distances. Integration of machine learning with both approaches is expected to drive innovations, resulting in more adaptive and intelligent robotic systems capable of transitioning seamlessly between autonomous and remote control modes.
Choosing the Right Navigation Approach for Your Robotics Project
Autonomous navigation leverages advanced sensors and AI algorithms to enable robots to independently map environments and make real-time decisions, optimizing efficiency in dynamic or unstructured settings. Remote navigation relies on human operators controlling robots via communication interfaces, providing precision and oversight for complex or delicate tasks where human judgment is critical. Selecting the right approach depends on project requirements such as environmental complexity, task autonomy, latency tolerance, and available computational resources.
Autonomous navigation vs Remote navigation Infographic