Cartesian robots operate on three linear axes (X, Y, and Z) and are ideal for tasks requiring precise, repeatable movements in a defined rectangular workspace. Articulated robots feature rotary joints that provide greater flexibility and reach, making them suitable for complex tasks such as assembly, welding, and material handling. While Cartesian robots offer simplicity and cost-effectiveness for pick-and-place operations, articulated robots excel in dynamic and versatile industrial applications.
Table of Comparison
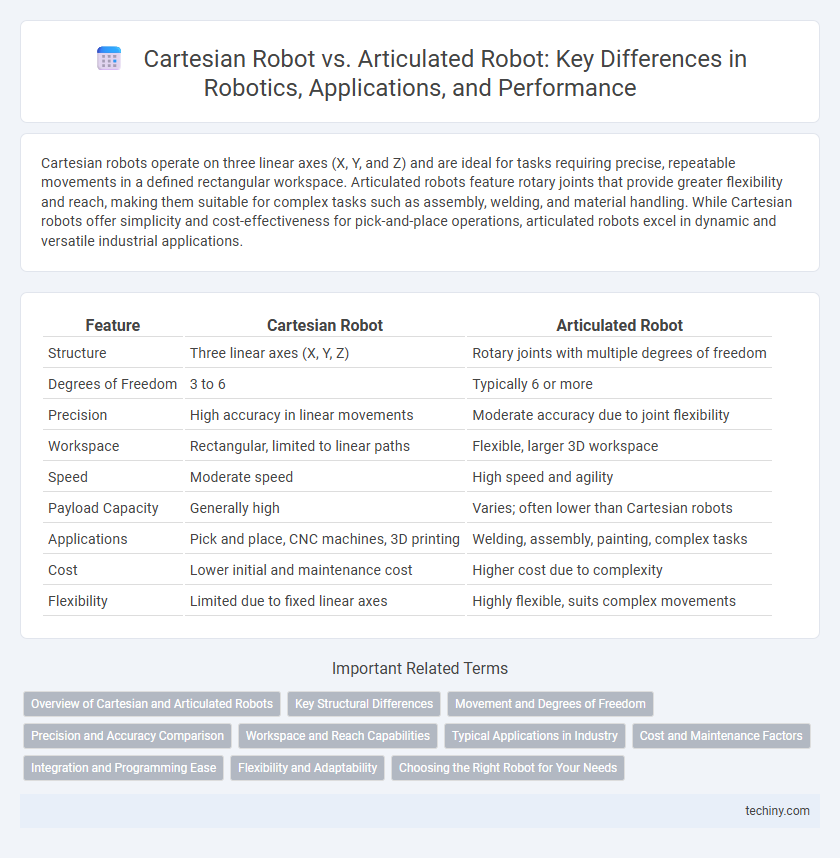
| Feature | Cartesian Robot | Articulated Robot |
|---|---|---|
| Structure | Three linear axes (X, Y, Z) | Rotary joints with multiple degrees of freedom |
| Degrees of Freedom | 3 to 6 | Typically 6 or more |
| Precision | High accuracy in linear movements | Moderate accuracy due to joint flexibility |
| Workspace | Rectangular, limited to linear paths | Flexible, larger 3D workspace |
| Speed | Moderate speed | High speed and agility |
| Payload Capacity | Generally high | Varies; often lower than Cartesian robots |
| Applications | Pick and place, CNC machines, 3D printing | Welding, assembly, painting, complex tasks |
| Cost | Lower initial and maintenance cost | Higher cost due to complexity |
| Flexibility | Limited due to fixed linear axes | Highly flexible, suits complex movements |
Overview of Cartesian and Articulated Robots
Cartesian robots operate on three linear axes (X, Y, and Z), providing precise and repeatable motion ideal for pick-and-place tasks, assembly, and CNC machining. Articulated robots feature rotary joints with multiple degrees of freedom, offering greater flexibility and range of motion suited for complex tasks such as welding, painting, and intricate assembly. The choice between Cartesian and articulated robots depends on application requirements, workspace constraints, and desired movement precision.
Key Structural Differences
Cartesian robots feature linear axes arranged perpendicularly, enabling precise, straight-line movements along X, Y, and Z coordinates, ideal for applications requiring high positional accuracy. Articulated robots possess rotary joints that mimic human arm movements, providing greater flexibility and a wider range of motion suited for complex tasks such as assembly and welding. The key structural difference lies in Cartesian robots' prismatic joints offering linear motion, whereas articulated robots utilize revolute joints enabling multi-directional rotation.
Movement and Degrees of Freedom
Cartesian robots move along three linear axes (X, Y, and Z), offering precise, straight-line motion with typically three degrees of freedom, ideal for applications requiring simple, repetitive tasks. Articulated robots feature rotary joints providing higher flexibility and multiple degrees of freedom, often six or more, enabling complex movements such as reaching around objects or performing intricate assembly. The increased degrees of freedom in articulated robots support versatile path planning, while Cartesian robots excel in environments demanding rigidity and positional accuracy.
Precision and Accuracy Comparison
Cartesian robots exhibit higher precision and repeatability due to their linear movement along three perpendicular axes, ideal for tasks requiring exact positioning like CNC machining. Articulated robots offer greater flexibility with multiple rotary joints but typically have lower accuracy because of complex kinematics and error accumulation in joint angles. For applications prioritizing precision and accuracy, Cartesian robots outperform articulated robots in consistent and precise linear motion control.
Workspace and Reach Capabilities
Cartesian robots operate within a rectangular workspace defined by three linear axes, offering high precision and repeatability ideal for tasks requiring straight-line movements. Articulated robots feature rotary joints that provide a spherical or cylindrical workspace, enabling greater reach and flexibility for complex, multi-directional tasks. The choice between Cartesian and articulated robots depends on the required workspace size, shape, and the complexity of the application.
Typical Applications in Industry
Cartesian robots excel in applications requiring precise linear motion, such as CNC machining, 3D printing, and pick-and-place operations in electronics assembly. Articulated robots provide greater flexibility and reach, making them ideal for welding, painting, and complex assembly tasks in automotive manufacturing. Both robot types enhance productivity and accuracy, with Cartesian robots favored for repetitive linear tasks and articulated robots preferred for multi-axis movements.
Cost and Maintenance Factors
Cartesian robots typically offer lower initial costs and simpler maintenance due to their straightforward linear design and fewer moving parts. Articulated robots, while more expensive upfront, require specialized maintenance and higher costs because of their complex jointed arms and advanced control systems. Cost efficiency for Cartesian robots suits applications prioritizing budget and ease of upkeep, whereas articulated robots provide versatility at increased maintenance investment.
Integration and Programming Ease
Cartesian robots offer straightforward integration due to their linear, three-axis movement, simplifying programming and reducing setup time in automated systems. Articulated robots provide greater flexibility with multi-joint configurations but require more complex programming and advanced control algorithms, impacting integration efforts. Choosing between Cartesian and articulated robots depends on balancing ease of programming with the desired operational range and precision in industrial automation.
Flexibility and Adaptability
Cartesian robots excel in repeatability and precision within linear, predefined paths, making them ideal for tasks requiring high accuracy in a structured environment. Articulated robots offer superior flexibility and adaptability with multiple rotary joints, enabling complex, multi-directional movements essential for diverse and dynamic applications. The enhanced maneuverability of articulated robots supports intricate assembly, welding, and material handling operations that demand variable positioning and orientation.
Choosing the Right Robot for Your Needs
Cartesian robots deliver precise linear movement along X, Y, and Z axes, making them ideal for applications requiring high accuracy like pick-and-place tasks and CNC machining. Articulated robots provide greater flexibility and reach with multiple rotary joints, best suited for complex assembly, welding, and material handling in dynamic environments. Selecting the right robot depends on the specific task requirements, workspace constraints, and payload capacity to optimize efficiency and performance.
Cartesian robot vs Articulated robot Infographic