Dexterity in robotics refers to the ability of a robotic arm or manipulator to perform precise and complex movements within a limited space, enhancing fine motor skills and adaptability. Reachability defines the maximum spatial extent a robot can access, determining how far it can reach to interact with objects or perform tasks. Balancing dexterity and reachability is crucial for optimizing robot efficiency in applications requiring both precision and extended range.
Table of Comparison
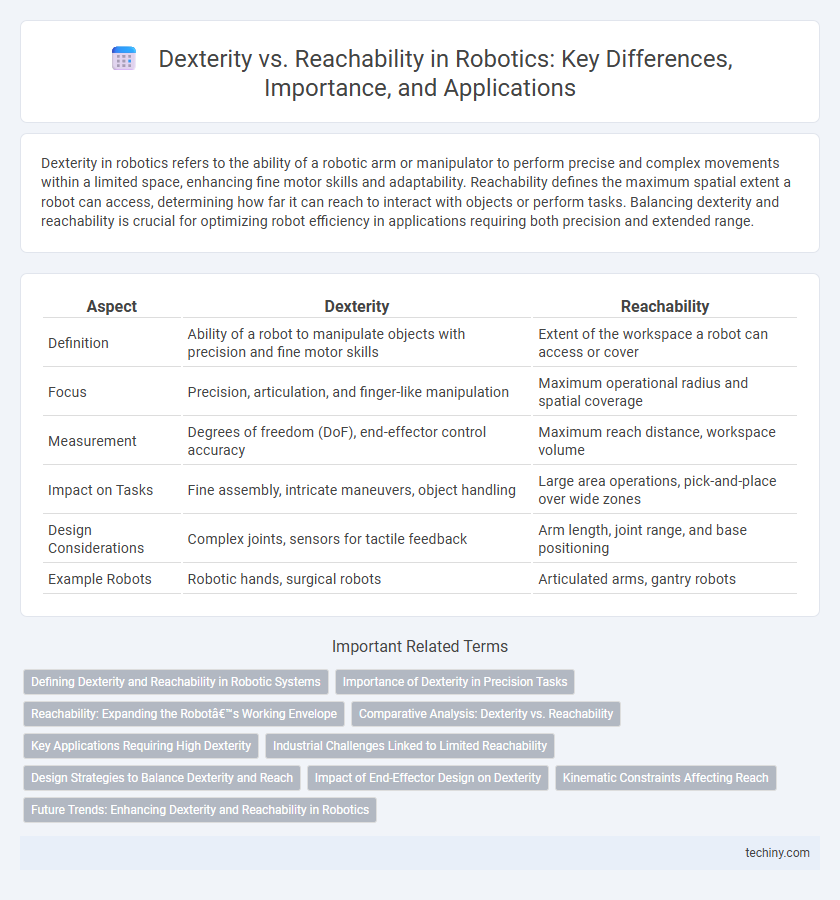
| Aspect | Dexterity | Reachability |
|---|---|---|
| Definition | Ability of a robot to manipulate objects with precision and fine motor skills | Extent of the workspace a robot can access or cover |
| Focus | Precision, articulation, and finger-like manipulation | Maximum operational radius and spatial coverage |
| Measurement | Degrees of freedom (DoF), end-effector control accuracy | Maximum reach distance, workspace volume |
| Impact on Tasks | Fine assembly, intricate maneuvers, object handling | Large area operations, pick-and-place over wide zones |
| Design Considerations | Complex joints, sensors for tactile feedback | Arm length, joint range, and base positioning |
| Example Robots | Robotic hands, surgical robots | Articulated arms, gantry robots |
Defining Dexterity and Reachability in Robotic Systems
Dexterity in robotic systems refers to the robot's ability to perform precise, complex, and varied manipulations within its workspace, emphasizing fine motor skills and adaptability. Reachability defines the spatial domain or volume within which a robot can position its end-effector or tool, focusing on the robot's geometric and kinematic constraints. Balancing dexterity and reachability ensures optimal task performance by maximizing both the range of motion and the quality of manipulation.
Importance of Dexterity in Precision Tasks
Dexterity in robotics is crucial for executing precision tasks as it enables fine manipulation and complex movements within confined spaces. Unlike reachability, which determines the robot's accessible workspace, dexterity enhances control and accuracy, allowing for delicate handling of objects and intricate assembly processes. High dexterity directly impacts a robot's ability to perform tasks that require nuanced force application and precise positioning, essential in fields like surgery and electronics manufacturing.
Reachability: Expanding the Robot’s Working Envelope
Reachability defines the spatial volume within which a robot can position its end effector, directly influencing its operational workspace and task versatility. Maximizing reachability ensures the robot can access a broader range of points without repositioning, enhancing efficiency in complex assembly or material handling tasks. Advanced kinematic designs and joint configurations increase reachability by expanding the robot's working envelope, enabling it to perform diverse operations across larger or more irregular environments.
Comparative Analysis: Dexterity vs. Reachability
Dexterity in robotics refers to the robot's ability to perform precise and complex tasks with fine motor control, while reachability denotes the spatial extent within which a robot can position its end-effector. High dexterity enables manipulators to execute intricate operations requiring accuracy and adaptability, whereas extensive reachability ensures access to a larger workspace but may sacrifice precision. Optimizing robotic performance requires balancing dexterity and reachability according to the application's demands, maximizing operational efficiency and task effectiveness.
Key Applications Requiring High Dexterity
Key applications requiring high dexterity in robotics include surgical robots performing minimally invasive procedures, complex assembly tasks in electronics manufacturing, and precision handling in laboratory automation. High dexterity enables robots to manipulate small, delicate components with accuracy and adjust to varying orientations in confined spaces. In contrast, reachability is crucial for large-scale tasks but does not substitute the fine motor control needed for intricate operations.
Industrial Challenges Linked to Limited Reachability
Limited reachability in industrial robotics constrains the operational workspace, reducing efficiency in assembly lines and manufacturing processes. Dexterity often compensates for reach limitations, but restricted reachability causes bottlenecks where robots cannot access critical components or perform necessary maneuvers. Overcoming these challenges requires advanced robotic arm designs and optimized workcell layouts to enhance task coverage without sacrificing precision or speed.
Design Strategies to Balance Dexterity and Reach
Design strategies for balancing dexterity and reach in robotics involve optimizing joint configurations and link lengths to achieve both precise manipulation and extended workspace. Incorporating modular arms with adjustable segments allows tailored adaptability, enhancing reach without compromising fine motor control. Utilizing advanced kinematic algorithms enables dynamic trade-offs between dexterity and reach, ensuring efficient performance across diverse tasks.
Impact of End-Effector Design on Dexterity
The end-effector design critically influences robotic dexterity by determining the range of precise movements and manipulations possible within a confined workspace. Compact, multi-degree-of-freedom grippers enhance dexterity, enabling complex tasks such as delicate object handling or intricate assembly processes. Optimizing end-effector geometry directly improves task efficiency and adaptability, surpassing mere reachability considerations.
Kinematic Constraints Affecting Reach
Kinematic constraints critically influence a robot's reachability by limiting the range of positions its end effector can achieve within its workspace. Dexterity, defined by the robot's ability to orient and position its end effector precisely, often conflicts with maximizing reach, as enhancing reach may reduce maneuverability under joint limitations. Understanding joint angle restrictions, link lengths, and singularities is essential for optimizing robotic performance in tasks requiring both extensive reach and high dexterity.
Future Trends: Enhancing Dexterity and Reachability in Robotics
Future trends in robotics emphasize improving dexterity and reachability through advanced actuator technologies and AI-driven motion planning algorithms. Integration of soft robotics materials enhances manipulators' adaptability in complex environments, allowing precise and extended reach capabilities. Research in sensor fusion and machine learning optimizes real-time adjustments, significantly boosting robots' functional versatility in dynamic operational contexts.
Dexterity vs Reachability Infographic