Differential drive robots use independently controlled wheels on either side, enabling smooth turns by varying wheel speeds, which provides precise maneuverability on flat surfaces. Skid steer robots steer by varying the speed of fixed wheels or tracks, resulting in a pivot turn but increased wear on surfaces due to skidding motion. Choosing between differential drive and skid steer depends on terrain adaptability, precision requirements, and maintenance considerations in robotic applications.
Table of Comparison
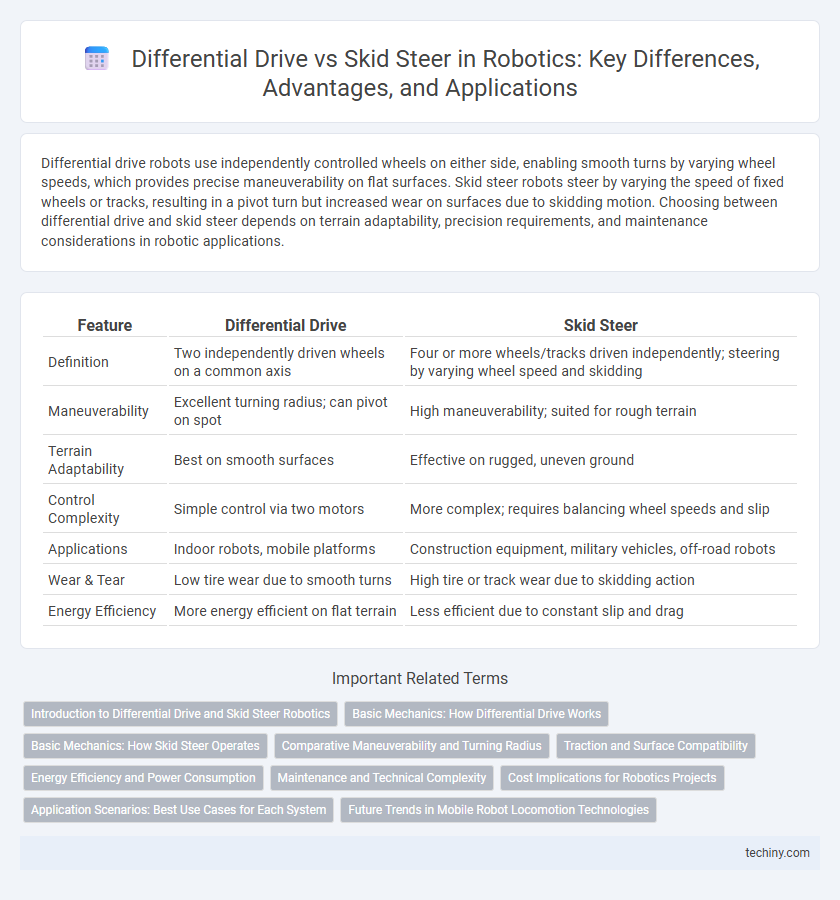
| Feature | Differential Drive | Skid Steer |
|---|---|---|
| Definition | Two independently driven wheels on a common axis | Four or more wheels/tracks driven independently; steering by varying wheel speed and skidding |
| Maneuverability | Excellent turning radius; can pivot on spot | High maneuverability; suited for rough terrain |
| Terrain Adaptability | Best on smooth surfaces | Effective on rugged, uneven ground |
| Control Complexity | Simple control via two motors | More complex; requires balancing wheel speeds and slip |
| Applications | Indoor robots, mobile platforms | Construction equipment, military vehicles, off-road robots |
| Wear & Tear | Low tire wear due to smooth turns | High tire or track wear due to skidding action |
| Energy Efficiency | More energy efficient on flat terrain | Less efficient due to constant slip and drag |
Introduction to Differential Drive and Skid Steer Robotics
Differential drive robots utilize two independently driven wheels on either side, enabling precise control of movement and rotation by varying the speed of each wheel, making them ideal for indoor navigation and simple terrain. Skid steer systems, common in robotics and heavy machinery, operate with four or more wheels or tracks that remain fixed while turning is achieved by driving the wheels on one side faster than the other, providing superior maneuverability on rough or uneven surfaces. Both drive mechanisms offer distinct advantages in robotics applications, with differential drive excelling in efficiency and control, and skid steer excelling in traction and stability over diverse terrains.
Basic Mechanics: How Differential Drive Works
Differential drive robots use two separately driven wheels on either side, allowing the vehicle to move forward, backward, and turn by varying the speed and direction of each wheel independently. This mechanism enables smooth and precise control over the robot's movement by adjusting wheel velocities to create differential torque. The simplicity of differential drive systems offers efficient basic mechanics for mobile robotics, especially in indoor environments.
Basic Mechanics: How Skid Steer Operates
Skid steer operates by independently driving the wheels on each side of the robot at different speeds or directions, creating a turning force through differential friction with the ground. Unlike differential drive, which relies on angular velocity differences between two wheels, skid steer achieves turning by locking wheels on one side while driving the opposite side forward or backward. This mechanism allows precise in-place rotation and high maneuverability, especially on rough terrain or tight spaces.
Comparative Maneuverability and Turning Radius
Differential drive robots offer precise maneuverability with independent wheel control, enabling smooth turns and a minimal turning radius ideal for confined spaces. Skid steer systems rely on wheel slipping to pivot, resulting in a larger turning radius and less efficient maneuverability on certain surfaces. The choice between differential drive and skid steer impacts navigation performance, especially in environments demanding agile and sharp turns.
Traction and Surface Compatibility
Differential drive robots offer superior traction on uneven or slippery surfaces due to independent wheel control, enhancing maneuverability in complex terrains. Skid steer systems rely on wheel slippage for turning, which can reduce traction on soft or loose surfaces and increase surface wear. Selecting between the two depends on the operational environment, with differential drive preferred for varied terrains and skid steer suited for flat, hard surfaces.
Energy Efficiency and Power Consumption
Differential drive robots typically consume less energy due to their simpler drive mechanisms, enabling more efficient power transfer to wheels during navigation. Skid steer systems experience higher power loss from increased friction and slippage during turning maneuvers, resulting in greater energy consumption. Optimizing motor torque control and minimizing slippage are critical for enhancing the energy efficiency of skid steer robotics.
Maintenance and Technical Complexity
Differential drive robots feature independent wheel motors that simplify maintenance by allowing easier access to components and fewer mechanical linkages, reducing the risk of wear and tear. Skid steer systems involve a more complex drivetrain with multiple clutches and brakes, increasing technical complexity and requiring frequent calibration and maintenance to prevent drivetrain damage. The differential drive's straightforward design typically results in lower long-term maintenance costs and reduced downtime compared to the intricate skid steer mechanisms.
Cost Implications for Robotics Projects
Differential drive systems typically reduce costs by using fewer motors and simpler control mechanics compared to skid steer systems, which require more robust components to manage the increased friction from wheel dragging. Skid steer robots often incur higher maintenance expenses due to tire wear and power loss, impacting long-term project budgets. Choosing differential drive can lead to significant savings in both initial investment and operational expenditures for robotics projects.
Application Scenarios: Best Use Cases for Each System
Differential drive robots excel in indoor navigation and precise maneuvering tasks such as warehouse automation and service robotics due to their simple control and tight turning radius. Skid steer systems offer superior traction and stability on rough, uneven terrain, making them ideal for outdoor applications like agricultural machinery and construction equipment. Choosing between these systems depends on the environment and movement requirements, with differential drives favoring smooth surfaces and skid steers optimized for heavy-duty, off-road conditions.
Future Trends in Mobile Robot Locomotion Technologies
Differential drive systems continue to evolve with enhanced precision control and energy efficiency, making them ideal for compact and maneuverable mobile robots. Skid steer mechanisms are advancing through improved traction materials and adaptive control algorithms to navigate complex terrains more effectively. Future trends emphasize hybrid locomotion systems integrating differential drive agility with skid steer robustness, aiming for versatile, autonomous robots capable of diverse operational environments.
Differential drive vs Skid steer Infographic